
Roboty Kawasaki Robotics serii M, o maksymalnych udźwigach, są dobrze przystosowane do precyzyjnego przenoszenia ciężkich elementów obrabianych, takich jak karoserie samochodowe, przyrządy, odlewy, korpusy maszyn CNC, materiały budowlane i duże urządzenia elektryczne.
W wersji 4-osiowej umożliwiają szybką paletyzację obiektów do 500 kg. Wersja 6-osiowa umożliwia przenoszenie i manipulację ciężarami do 1500 kg.
Innowacyjna konstrukcja linii robota Kawasaki Robotics serii M zapewnia moc do podnoszenia i przemieszczania dużych ładunków z wielką łatwością i precyzyjną dokładnością m.in. karoserii samochodów, materiałów budowlanych, czy dużych urządzeń elektrycznych.
Ponadto, robot Kawasaki Robotics jest w stanie osiągnąć wiodące w tej branży momenty obrotowe nadgarstka, wynoszące 5488Nm dla robota Kawasaki MX700N i 15000Nm dla robota Kawasaki MG15HL.
Jego zastosowanie zapewnia doskonałe wyniki podczas pracy z niecentrowanymi przedmiotami. Co ciekawe, osie wpływające na dokładność ruchów ramienia wykorzystują bardzo sztywne śruby o minimalnym luzie, dzięki czemu zmniejsza się ugięcie ramienia, przy jednoczesnym zapewnieniu wysokiej dokładności pozycjonowania.
Roboty Kawasaki Robotics serii M można programować na dwa sposoby, za pomocą teach pendanta lub komputera oraz przy użyciu jednej z dwóch metod programowania Kawasaki Robotics - Block Step lub AS Language.

Kontroler Kawasaki Robotics E0x
Kontroler E0x Kawasaki Robotics charakteryzują się niską wagą i posiada umiejętność ograniczania strat energii elektrycznej. Model E01, E02 i E04 dedykowane są dla serii robotów BA, BX, BT, CX, MX, RA, RS, ZX, natomiast kontrolery E03 są obsługiwane przez roboty paletyzujące Kawasaki Robotics serii CP i RD.

Kontroler Kawasaki Robotics E5x
Kontroler Kawasaki Robotics E5x pomimo dużych gabarytów i wysokiej wagi jest łatwy w przemieszczaniu z miejsca na miejsce. Model E58 dedykowany jest do współpracy z robotami Kawasaki Robotics serii MG, o największych udźwigach.
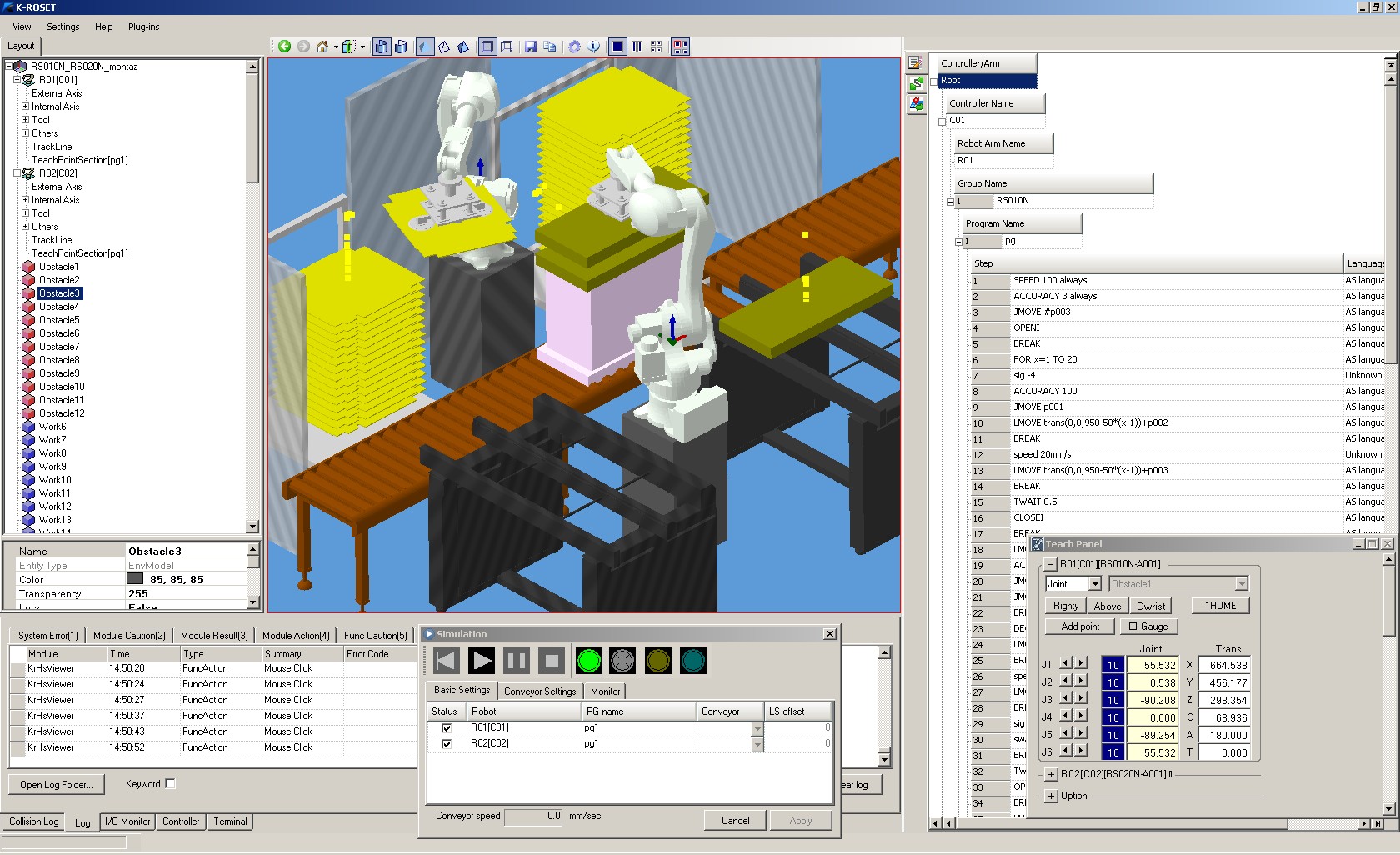
K-Roset to symulator zrobotyzowanych stanowisk pracy z robotami Kawasaki Robotics. W prosty i przejrzysty sposób pozwala na stworzenie symulacji, wykorzystując roboty z oferty Kawasaki Robotics.
Program umożliwiający zaawansowaną pracę z robotami Kawasaki Robotics. Pozwala na realizację komunikacji terminalowej, kompleksowe tworzenie oraz modyfikowanie aplikacji. Posiada wbudowany edytor tekstowy, dzięki któremu można w wygodny sposób tworzyć programy.
CS-Configurator to program umożliwiający konfigurację funkcji bezpieczeństwa dostępnych w module Cubic-s dla robotów Kawasaki Robotics. Moduł ten odpowiada za monitorowanie ruchu robota Kawasaki Robotics – a w sytuacji w której zostanie zarejestrowany ruch niedozwolony, robot zostaje zatrzymany awaryjnie.

Obsługa maszyny to zadanie, które w dużej mierze decyduje o wydajności produkcji całego zakładu. Dlatego szczególnie ważna jest tu prędkość robotów przemysłowych Kawasaki Robotics. Ich precyzja i powtarzalność pozwala dodatkowo ograniczyć ilość braków i lepiej monitorować proces.
Czytaj więcej.
Pakowanie i paletyzacja (bądź depaletyzacja) to zadania mocno obciążające pracowników, które często stają się wąskim gardłem w zakładach produkcyjnych. Zastosowanie robotów przemysłowych Kawasaki Robotics pozwala uzyskać stałą wydajność linii pakującej/paletyzującej oraz jakość paletyzacji, a co za tym idzie terminowość dostaw i bezpieczeństwo produktów w transporcie.
Czytaj więcej.Roboty Kawasaki Robotics z serii MG zapewniają maksymalne udźwigi – nawet do 1500 kg oraz gigantyczny zasięg 4005 mm. Są to największe roboty w ofercie firmy Kawasaki Robotics. Roboty Kawasaki Robotics serii MG pozwalają manipulować ciężkimi obiektami i przenosić je na dystansie ponad 4 metrów.
Kawasaki Robotics MG15HL – udźwig 1500kg, zasięg 4005 mm
 |
Opis robota:Roboty z serii MG zapewniają maksymalne udźwigi – nawet do 1500kg oraz gigantyczny zasięg 4005mm. Są to największe roboty w ofercie firmy Kawasaki. Roboty serii MG pozwalają manipulować ciężkimi obiektami i przenosić je na dystansie ponad 4 metrów. |
Przestrzeń robocza Pobierz obrazek w wysokiej rozdzielczości |
| MG15HL | |
|---|---|
| Waga robota [kg] | 6550 |
| Maksymalny udźwig [kg] | 1500 |
| Maksymalny zasięg [mm] | 4005 |
| Ilość stopni swobody | 6 |
| Powtarzalność [mm] | +/- 0.1 |
| Zakres ruchu [°] | |
| JT1 | +/- 150 |
| JT2 | +90 ~ -40 |
| JT3 | +30 ~ -110 |
| JT4 | +/- 360 |
| JT5 | +/- 120 |
| JT6 | +/- 360 |
| Prędkości [°/s] | |
| JT1 | 65 |
| JT2 | 33.5 |
| JT3 | 37.5 |
| JT4 | 36 |
| JT5 | 36 |
| JT6 | 80 |
| Montaż | |
| podłogowy | TAK |
| odwrotny | NIE |
| na ścianie | NIE |
| na półce | NIE |
| Kontroler | E58 |
 |
Opis robota:Roboti MT400N charakteryzujący się bardzo dużym udźwigiem,zasięgiem i prędkoścą przy zachowaniu bardzo wysokiej precyzji i 6 stopni swobody. |
Przestrzeń robocza Pobierz obrazek w wysokiej rozdzielczości |
| MT400N | |
|---|---|
| Waga robota [kg] | 2600 |
| Maksymalny udźwig [kg] | 400 |
| Maksymalny zasięg [mm] | 3503 |
| Ilość stopni swobody | 6 |
| Powtarzalność [mm] | +/- 0.5 |
| Zakres ruchu [°] | |
| JT1 | +/- 180 |
| JT2 | +15 ~ -135 |
| JT3 | +106 ~ -30 |
| JT4 | +/- 360 |
| JT5 | +/- 120 |
| JT6 | +/- 360 |
| Prędkości [°/s] | |
| JT1 | 80 |
| JT2 | 70 |
| JT3 | 70 |
| JT4 | 70 |
| JT5 | 70 |
| JT6 | 130 |
| Montaż | |
| podłogowy | NIE |
| odwrotny | NIE |
| na ścianie | NIE |
| na półce | TAK |
| Kontroler | E02 |
Roboty Kawasaki Robotics serii MX to sześcioosiowe roboty najwyższej klasy. Pomimo wielkiego udźwigu (od 350 do 700 kg), ramię robota Kawasaki Robotics ma budowę kompaktową. W tej serii oferowane są 4 modele: Kawasaki Robotics MX700N, MX500N, MX420L oraz MX350L.
Kawasaki Robotics MX350L - udźwig 350 kg, zasięg 3018 mm
 |
Opis robota:Robot serii MX charakteryzuje się bardzo dużym udźwigiem,zasięgiem i prędkoścą przy zachowaniu bardzo wysokiej precyzji i 6 stopni swobody. |
Przestrzeń robocza Pobierz obrazek w wysokiej rozdzielczości |
| MX350L | |
|---|---|
| Waga robota [kg] | 2800 |
| Maksymalny udźwig [kg] | 350 |
| Maksymalny zasięg [mm] | 3018 |
| Ilość stopni swobody | 6 |
| Powtarzalność [mm] | +/-0.1 |
| Zakres ruchu [°] | |
| JT1 | +/- 180 |
| JT2 | +90~-45 |
| JT3 | +20~-115 |
| JT4 | +/- 360 |
| JT5 | +/- 110 |
| JT6 | +/- 360 |
| Prędkości [°/s] | |
| JT1 | 80 |
| JT2 | 70 |
| JT3 | 70 |
| JT4 | 80 |
| JT5 | 80 |
| JT6 | 120 |
| Montaż | |
| podłogowy | TAK |
| odwrotny | NIE |
| na ścianie | NIE |
| na półce | NIE |
| Kontroler | E04 |
Kawasaki Robotics MX420L - udźwig 420 kg, zasięg 2778 mm
 |
Opis robota:Robot serii MX charakteryzuje się bardzo dużym udźwigiem,zasięgiem i prędkoścą przy zachowaniu bardzo wysokiej precyzji i 6 stopni swobody. |
Przestrzeń robocza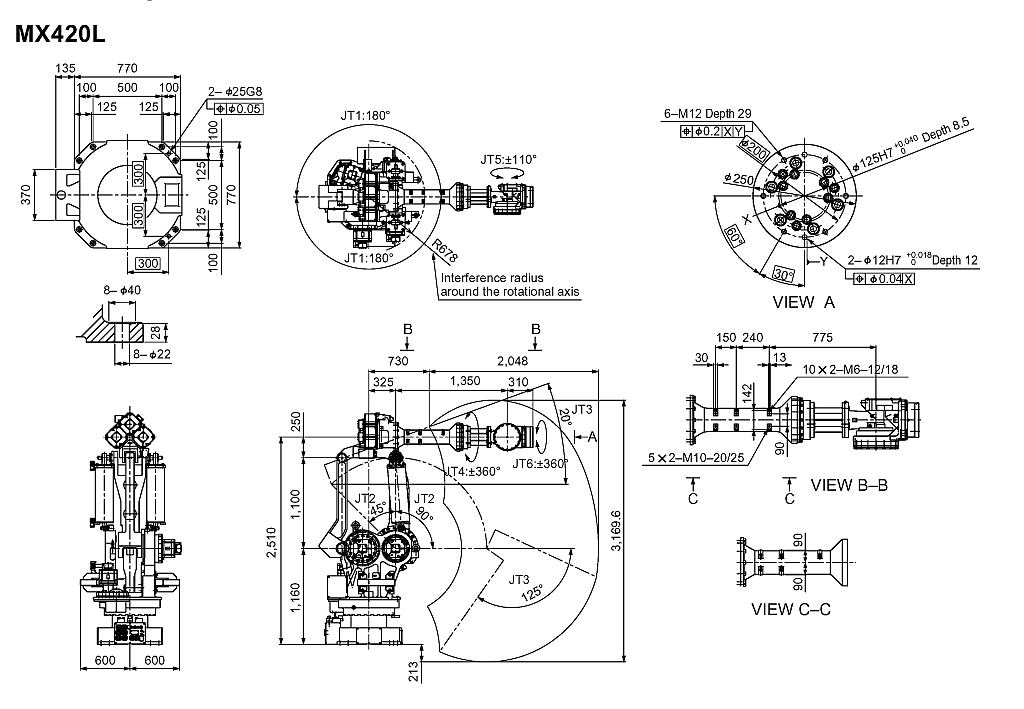 Pobierz obrazek w wysokiej rozdzielczości |
| MX420L | |
|---|---|
| Waga robota [kg] | 2800 |
| Maksymalny udźwig [kg] | 420 |
| Maksymalny zasięg [mm] | 2778 |
| Ilość stopni swobody | 6 |
| Powtarzalność [mm] | +/-0.1 |
| Zakres ruchu [°] | |
| JT1 | +/- 180 |
| JT2 | +90~-45 |
| JT3 | +20~-125 |
| JT4 | +/- 360 |
| JT5 | +/- 110 |
| JT6 | +/- 360 |
| Prędkości [°/s] | |
| JT1 | 80 |
| JT2 | 70 |
| JT3 | 70 |
| JT4 | 80 |
| JT5 | 80 |
| JT6 | 120 |
| Montaż | |
| podłogowy | TAK |
| odwrotny | NIE |
| na ścianie | NIE |
| na półce | NIE |
| Kontroler | E04 |
Kawasaki Robotics MX500N - udźwig 500 kg, zasięg 2540 mm
 |
Opis robota:Robot serii MX charakteryzuje się bardzo dużym udźwigiem,zasięgiem i prędkoścą przy zachowaniu bardzo wysokiej precyzji i 6 stopni swobody. |
Przestrzeń robocza Pobierz obrazek w wysokiej rozdzielczości |
| MX500N | |
|---|---|
| Waga robota [kg] | 2750 |
| Maksymalny udźwig [kg] | 500 |
| Maksymalny zasięg [mm] | 2540 |
| Ilość stopni swobody | 6 |
| Powtarzalność [mm] | +/-0.1 |
| Zakres ruchu [°] | |
| JT1 | +/- 180 |
| JT2 | +90~-45 |
| JT3 | +20~-130 |
| JT4 | +/- 360 |
| JT5 | +/- 110 |
| JT6 | +/- 360 |
| Prędkości [°/s] | |
| JT1 | 80 |
| JT2 | 70 |
| JT3 | 70 |
| JT4 | 80 |
| JT5 | 80 |
| JT6 | 120 |
| Montaż | |
| podłogowy | TAK |
| odwrotny | NIE |
| na ścianie | NIE |
| na półce | NIE |
| Kontroler | E04 |
Kawasaki Robotics MX700N - udźwig 700 kg, zasięg 2540 mm
 |
Opis robota:Robot serii MX charakteryzuje się bardzo dużym udźwigiem,zasięgiem i prędkoścą przy zachowaniu bardzo wysokiej precyzji i 6 stopni swobody. |
Przestrzeń robocza Pobierz obrazek w wysokiej rozdzielczości |
| MX700N | |
|---|---|
| Waga robota [kg] | 2860 |
| Maksymalny udźwig [kg] | 700 |
| Maksymalny zasięg [mm] | 2540 |
| Ilość stopni swobody | 6 |
| Powtarzalność [mm] | +/-0.1 |
| Zakres ruchu [°] | |
| JT1 | +/- 180 |
| JT2 | +90~-45 |
| JT3 | +20~-130 |
| JT4 | +/- 360 |
| JT5 | +/- 110 |
| JT6 | +/- 360 |
| Prędkości [°/s] | |
| JT1 | 65 |
| JT2 | 50 |
| JT3 | 45 |
| JT4 | 50 |
| JT5 | 50 |
| JT6 | 95 |
| Montaż | |
| podłogowy | TAK |
| odwrotny | NIE |
| na ścianie | NIE |
| na półce | NIE |
| Kontroler | E04 |

Zostaw wiadomość lub zadaj pytanie – odpowiemy niezwłocznie.


Napisz do nas - odpowiemy w ciągu 24h
Potrzebujesz pomocy? Skontaktuj się z nami. Odpowiemy na wszystkie Twoje pytania.
Szkolenie z obsługi i programowania robotów Kawasaki dla Integratorów
Szkolenie z zaawansowanych metod programowania robotów Kawasaki
WIŚNIOWSKI - cyfrowa indywidualizacja w fabryce przyszłości
Pierwsze w Polsce nowoczesne laboratorium sterowania i automatyki Astraada One na AGH w Krakowie
Nowoczesna produkcja wsadowa w zakładach chemicznych Stepan

Firma ASTOR od 30 lat wspiera podnoszenie efektywności procesów w przemyśle, produkcji oraz infrastrukturze dostarczając komponenty automatyki przemysłowej, robotyki, systemy IT oraz wiedzę biznesową i techniczną. Kierunek wspierania rozwoju i transformacji naszych Klientów wyznacza Przemysł 4.0. W naszym portfolio znajdują się systemy sterowania Emerson Industrial Automation&Control (dawniej GE Intelligent Platforms, GE Fanuc), Horner APG oraz Astraada One, oprogramowanie przemysłowe AVEVA (dawniej Wonderware), roboty przemysłowe Kawasaki i Epson, produkty do bezprzewodowej transmisji danych SATEL Oy i Astraada, a także falowniki, panele HMI i urządzenia sieciowe Astraada. Oferujemy usługi doradcze w ramach ASTOR Consulting i szkolenia w ramach Akademii ASTOR.

 Roboty do szkół
Roboty do szkół




 12 428 63 00
12 428 63 00


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}