
Roboty Kawasaki Robotics serii BX dedykowane są do zadań związanych z dużą liczbą przemieszczeń na krótkich dystansach (zgrzewanie, montaż, łączenie elementów, obsługa maszyn). Ograniczona masa i duża dynamika ruchów pozwala im z łatwością osiągać maksymalną prędkość i utrzymywać ją podczas pracy.
Roboty Kawasaki Robotics serii BX wyposażone są w lekkie ramiona i silniki o wysokiej wydajności i rozdzielczości oraz wykorzystują najnowszą technologię kontroli drgań.
Funkcje te pomagają skrócić czas potrzebny na ruchy o małym skoku, które stanowią główną część zgrzewania punktowego.
Ramię i nadgarstek robota Kawasaki Robotics serii B są wydrążone, co pozwala wewnętrznie poprowadzić wiązkę kabli do zgrzewania punktowego między podstawą a nadgarstkiem. To znacznie zwiększa wydajność zarówno programowania offline, jak i programowania na rzeczywistym stanowisku.
Okablowanie znajdujące się we wnętrzu robota Kawasaki Robotics jest w mniejszym stopniu narażone na przetarcie lub zwinięcie się, co w konsekwencji zmniejsza prawdopodobieństwo wystąpienia awarii.
Niewielka powierzchnia tych robotów o wąskim ramieniu pozwala na instalację w aplikacjach o „wysokiej gęstości” bez obniżania wydajności.

Kontroler Kawasaki Robotics E0x
Kontroler E0x Kawasaki Robotics charakteryzują się niską wagą i posiada umiejętność ograniczania strat energii elektrycznej. Model E01, E02 i E04 dedykowane są dla serii robotów BA, BX, BT, CX, MX, RA, RS, ZX, natomiast E03 są obsługiwane przez roboty paletyzujące CP i RD.
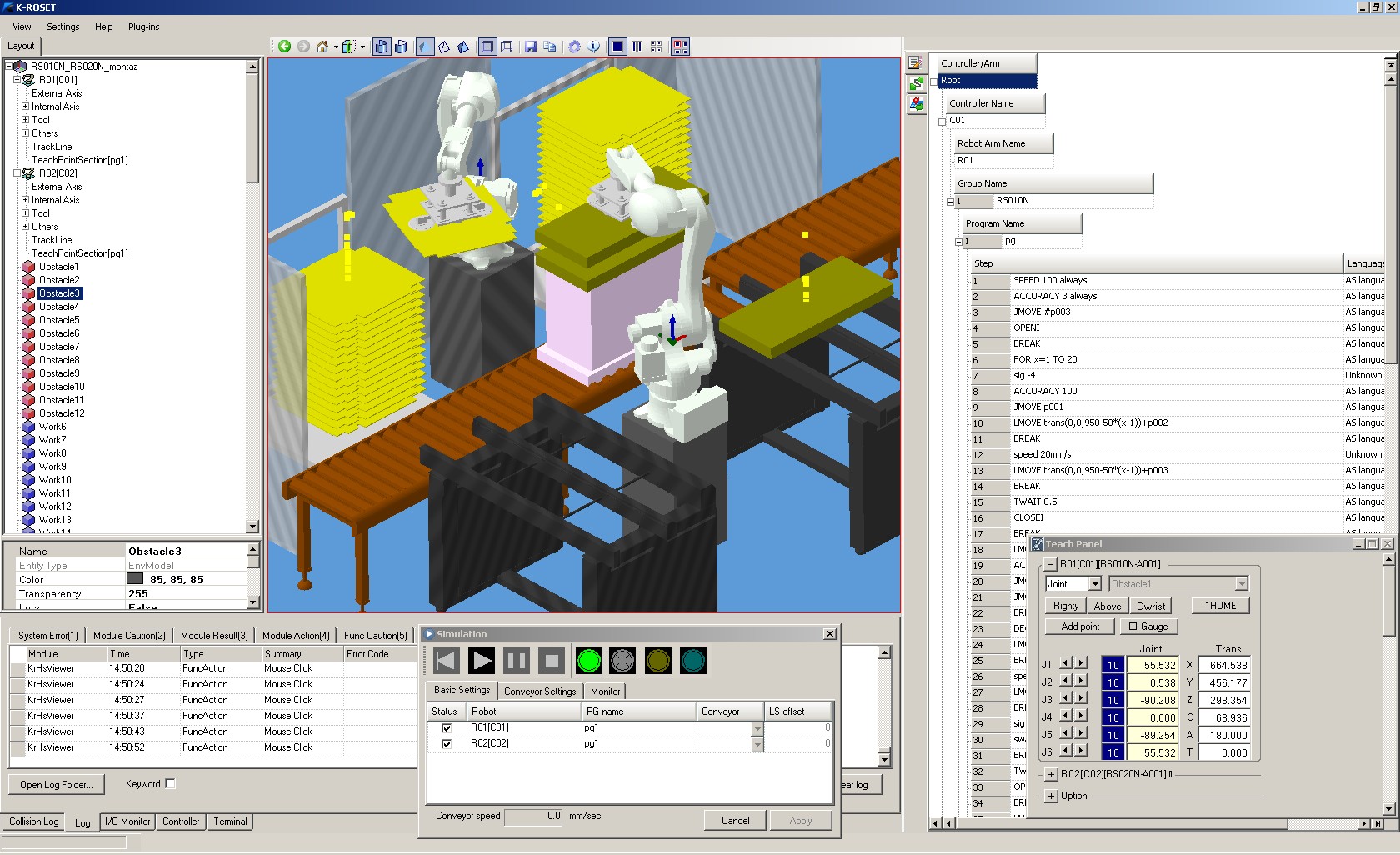
K-Roset to symulator zrobotyzowanych stanowisk pracy z robotami Kawasaki Robotics. W prosty i przejrzysty sposób pozwala na stworzenie symulacji, wykorzystując roboty z oferty Kawasaki Robotics.
Program umożliwiający zaawansowaną pracę z robotami Kawasaki Robotics. Pozwala na realizację komunikacji terminalowej, kompleksowe tworzenie oraz modyfikowanie aplikacji. Posiada wbudowany edytor tekstowy, dzięki któremu można w wygodny sposób tworzyć programy.
CS-Configurator to program umożliwiający konfigurację funkcji bezpieczeństwa dostępnych w module Cubic-s dla robotów Kawasaki Robotics. Moduł ten odpowiada za monitorowanie ruchu robota Kawasaki Robotics – a w sytuacji, w której zostanie zarejestrowany ruch niedozwolony, robot zostaje zatrzymany awaryjnie.

Obsługa maszyny to zadanie, które w dużej mierze decyduje o wydajności produkcji całego zakładu. Dlatego szczególnie ważna jest tu prędkość robotów przemysłowych. Ich precyzja i powtarzalność pozwala dodatkowo ograniczyć ilość braków i lepiej monitorować proces.
Czytaj więcej.
Spawanie zawsze było jednym z głównych zastosowań robotów przemysłowych. Zastosowanie robota Kawasaki Robotics pozwala zachować stałą jakość produkcji przy jednoczesnym ograniczeniu zużycia materiałów. Sprawia to, że inwestycje w zrobotyzowane spawanie zwracają się szybko.
Czytaj więcej.
W tym zastosowaniu roboty przemysłowe Kawasaki Robotics współpracują z dodatkowym wyposażeniem do przechowywania, przepompowywania oraz aplikowania substancji nakładanej. Systemy zbiorników, pomp i regulatorów stanowią integralną część stanowiska, którego głównym elementem jest robot. To robot Kawasaki Robotics za pomocą pistoletu (aplikatora) nanosi daną substancję na obiekt, który dodatkowo może się poruszać.
Czytaj więcej.
 |
Opis robota:Robot serii BX wyposażony jest w szybsze i bardziej sprawne serwonapędy co w połączeniu z kompaktową budową i lekkimi materiałami użytymi do budowy elementów ramion pozwoliło uzyskać szybkiego i zwinnego robota. Niespotykanie małe wymiary montażowe to dodatkowa cecha, która pozwala na montaż tych robotów w szczególnie małych przestrzeniach roboczych. Zaawansowana funkcja stabilizacji drgań ramienia pozwala skrócić czas cyklu. |
Przestrzeń robocza Pobierz obrazek w wysokiej rozdzielczości |
| BX100L | |
|---|---|
| Waga robota [kg] | 890 |
| Maksymalny udźwig [kg] | 100 |
| Maksymalny zasięg [mm] | 2597 |
| Ilość stopni swobody | 6 |
| Powtarzalność [mm] | +/- 0.06 |
| Zakres ruchu [°] | |
| JT1 | +/- 160 |
| JT2 | +76 ~ -60 |
| JT3 | +90 ~ -75 |
| JT4 | +/-210 |
| JT5 | +/-125 |
| JT6 | +/-210 |
| Prędkości [°/s] | |
| JT1 | 105 |
| JT2 | 130 |
| JT3 | 130 |
| JT4 | 200 |
| JT5 | 160 |
| JT6 | 300 |
| Montaż | |
| podłogowy | TAK |
| odwrotny | NIE |
| na ścianie | NIE |
| na półce | NIE |
| Kontroler | E02 |
| Stopień Ochrony IP | IP65 |
 |
Opis robota:Robot serii BX wyposażony jest w szybsze i bardziej sprawne serwonapędy co w połączeniu z kompaktową budową i lekkimi materiałami użytymi do budowy elementów ramion pozwoliło uzyskać szybkiego i zwinnego robota. Niespotykanie małe wymiary montażowe to dodatkowa cecha, która pozwala na montaż tych robotów w szczególnie małych przestrzeniach roboczych. Zaawansowana funkcja stabilizacji drgań ramienia pozwala skrócić czas cyklu. |
Przestrzeń robocza Pobierz obrazek w wysokiej rozdzielczości |
| BX100N | |
|---|---|
| Waga robota [kg] | 740 |
| Maksymalny udźwig [kg] | 100 |
| Maksymalny zasięg [mm] | 2200 |
| Ilość stopni swobody | 6 |
| Powtarzalność [mm] | +/- 0.06 |
| Zakres ruchu [°] | |
| JT1 | +/- 160 |
| JT2 | +120 ~ -65 |
| JT3 | +90 ~ -77 |
| JT4 | +/-210 |
| JT5 | +/-125 |
| JT6 | +/-210 |
| Prędkości [°/s] | |
| JT1 | 135 |
| JT2 | 110 |
| JT3 | 140 |
| JT4 | 200 |
| JT5 | 200 |
| JT6 | 300 |
| Montaż | |
| podłogowy | TAK |
| odwrotny | NIE |
| na ścianie | NIE |
| na półce | NIE |
| Kontroler | E02 |
| Stopień Ochrony IP | IP65 |
 |
Opis robota:Robot serii BX wyposażony jest w szybsze i bardziej sprawne serwonapędy co w połączeniu z kompaktową budową i lekkimi materiałami użytymi do budowy elementów ramion pozwoliło uzyskać szybkiego i zwinnego robota. Niespotykanie małe wymiary montażowe to dodatkowa cecha, która pozwala na montaż tych robotów w szczególnie małych przestrzeniach roboczych. Zaawansowana funkcja stabilizacji drgań ramienia pozwala skrócić czas cyklu. |
Przestrzeń robocza Pobierz obrazek w wysokiej rozdzielczości |
| BX100S | |
|---|---|
| Waga robota [kg] | 720 |
| Maksymalny udźwig [kg] | 100 |
| Maksymalny zasięg [mm] | 1634 |
| Ilość stopni swobody | 6 |
| Powtarzalność [mm] | +/- 0.06 |
| Zakres ruchu [°] | |
| JT1 | +/- 160 |
| JT2 | +120 ~ -65 |
| JT3 | +90 ~ -81 |
| JT4 | +/-210 |
| JT5 | +/-125 |
| JT6 | +/-210 |
| Prędkości [°/s] | |
| JT1 | 135 |
| JT2 | 125 |
| JT3 | 155 |
| JT4 | 200 |
| JT5 | 160 |
| JT6 | 300 |
| Montaż | |
| podłogowy | TAK |
| odwrotny | NIE |
| na ścianie | NIE |
| na półce | NIE |
| Kontroler | E02 |
| Stopień Ochrony IP | IP65 |
 |
Opis robota:Robot serii BX wyposażony jest w szybsze i bardziej sprawne serwonapędy co w połączeniu z kompaktową budową i lekkimi materiałami użytymi do budowy elementów ramion pozwoliło uzyskać szybkiego i zwinnego robota. Niespotykanie małe wymiary montażowe to dodatkowa cecha, która pozwala na montaż tych robotów w szczególnie małych przestrzeniach roboczych. Zaawansowana funkcja stabilizacji drgań ramienia pozwala skrócić czas cyklu. |
Przestrzeń robocza Pobierz obrazek w wysokiej rozdzielczości |
| BX130X | |
|---|---|
| Waga robota [kg] | 920 |
| Maksymalny udźwig [kg] | 130 |
| Maksymalny zasięg [mm] | 2991 |
| Ilość stopni swobody | 6 |
| Powtarzalność [mm] | +/- 0.06 |
| Zakres ruchu [°] | |
| JT1 | +/- 160 |
| JT2 | +76 ~ -60 |
| JT3 | +90 ~ -75 |
| JT4 | +/-210 |
| JT5 | +/-125 |
| JT6 | +/-210 |
| Prędkości [°/s] | |
| JT1 | 105 |
| JT2 | 90 |
| JT3 | 130 |
| JT4 | 200 |
| JT5 | 160 |
| JT6 | 300 |
| Montaż | |
| podłogowy | TAK |
| odwrotny | NIE |
| na ścianie | NIE |
| na półce | NIE |
| Kontroler | E02 |
| Stopień Ochrony IP | IP65 |
 |
Opis robota:Robot serii BX wyposażony jest w szybsze i bardziej sprawne serwonapędy co w połączeniu z kompaktową budową i lekkimi materiałami użytymi do budowy elementów ramion pozwoliło uzyskać szybkiego i zwinnego robota. Niespotykanie małe wymiary montażowe to dodatkowa cecha, która pozwala na montaż tych robotów w szczególnie małych przestrzeniach roboczych. Zaawansowana funkcja stabilizacji drgań ramienia pozwala skrócić czas cyklu. |
Przestrzeń robocza Pobierz obrazek w wysokiej rozdzielczości |
| BX165L | |
|---|---|
| Waga robota [kg] | 890 |
| Maksymalny udźwig [kg] | 165 |
| Maksymalny zasięg [mm] | 2597 |
| Ilość stopni swobody | 6 |
| Powtarzalność [mm] | +/- 0.06 |
| Zakres ruchu [°] | |
| JT1 | +/- 160 |
| JT2 | +76 ~ -60 |
| JT3 | +90 ~ -75 |
| JT4 | +/-210 |
| JT5 | +/-125 |
| JT6 | +/-210 |
| Prędkości [°/s] | |
| JT1 | 120 |
| JT2 | 110 |
| JT3 | 130 |
| JT4 | 170 |
| JT5 | 170 |
| JT6 | 280 |
| Montaż | |
| podłogowy | TAK |
| odwrotny | NIE |
| na ścianie | NIE |
| na półce | NIE |
| Kontroler | E02 |
| Stopień Ochrony IP | IP65 |
 |
Opis robota:Robot serii BX wyposażony jest w szybsze i bardziej sprawne serwonapędy co w połączeniu z kompaktową budową i lekkimi materiałami użytymi do budowy elementów ramion pozwoliło uzyskać szybkiego i zwinnego robota. Niespotykanie małe wymiary montażowe to dodatkowa cecha, która pozwala na montaż tych robotów w szczególnie małych przestrzeniach roboczych. Zaawansowana funkcja stabilizacji drgań ramienia pozwala skrócić czas cyklu. |
Przestrzeń robocza Pobierz obrazek w wysokiej rozdzielczości |
| BX165N | |
|---|---|
| Waga robota [kg] | 875 |
| Maksymalny udźwig [kg] | 165 |
| Maksymalny zasięg [mm] | 2325 |
| Ilość stopni swobody | 6 |
| Powtarzalność [mm] | +/- 0.06 |
| Zakres ruchu [°] | |
| JT1 | +/- 160 |
| JT2 | +76 ~ -60 |
| JT3 | +90 ~ -75 |
| JT4 | +/-210 |
| JT5 | +/-125 |
| JT6 | +/-210 |
| Prędkości [°/s] | |
| JT1 | 105 |
| JT2 | 130 |
| JT3 | 130 |
| JT4 | 120 |
| JT5 | 160 |
| JT6 | 300 |
| Montaż | |
| podłogowy | TAK |
| odwrotny | NIE |
| na ścianie | NIE |
| na półce | NIE |
| Kontroler | E02 |
| Stopień Ochrony IP | IP65 |
 |
Opis robota:Robot serii BX wyposażony jest w szybsze i bardziej sprawne serwonapędy co w połączeniu z kompaktową budową i lekkimi materiałami użytymi do budowy elementów ramion pozwoliło uzyskać szybkiego i zwinnego robota. Niespotykanie małe wymiary montażowe to dodatkowa cecha, która pozwala na montaż tych robotów w szczególnie małych przestrzeniach roboczych. Zaawansowana funkcja stabilizacji drgań ramienia pozwala skrócić czas cyklu. |
Przestrzeń robocza Pobierz obrazek w wysokiej rozdzielczości |
| BX200L | |
|---|---|
| Waga robota [kg] | 890 |
| Maksymalny udźwig [kg] | 200 |
| Maksymalny zasięg [mm] | 2597 |
| Ilość stopni swobody | 6 |
| Powtarzalność [mm] | +/- 0.06 |
| Zakres ruchu [°] | |
| JT1 | +/- 160 |
| JT2 | +76 ~ -60 |
| JT3 | +90 ~ -75 |
| JT4 | +/-210 |
| JT5 | +/-125 |
| JT6 | +/-210 |
| Prędkości [°/s] | |
| JT1 | 105 |
| JT2 | 90 |
| JT3 | 100 |
| JT4 | 120 |
| JT5 | 120 |
| JT6 | 200 |
| Montaż | |
| podłogowy | TAK |
| odwrotny | NIE |
| na ścianie | NIE |
| na półce | NIE |
| Kontroler | E02 |
| Stopień Ochrony IP | IP65 |
 |
Opis robota:Robot serii BX wyposażony jest w szybsze i bardziej sprawne serwonapędy co w połączeniu z kompaktową budową i lekkimi materiałami użytymi do budowy elementów ramion pozwoliło uzyskać szybkiego i zwinnego robota. Niespotykanie małe wymiary montażowe to dodatkowa cecha, która pozwala na montaż tych robotów w szczególnie małych przestrzeniach roboczych. Zaawansowana funkcja stabilizacji drgań ramienia pozwala skrócić czas cyklu. |
Przestrzeń robocza |
| BX200X | |
|---|---|
| Waga robota [kg] | 1450 |
| Maksymalny udźwig [kg] | 200 |
| Maksymalny zasięg [mm] | 3412 |
| Ilość stopni swobody | 6 |
| Powtarzalność [mm] | +/-0.07 |
| Zakres ruchu [°] | |
| JT1 | +/- 180 |
| JT2 | +76 ~ -60 |
| JT3 | +90 ~-110 |
| JT4 | +/- 210 |
| JT5 | +/-125 |
| JT6 | +/-210 |
| Prędkości [°/s] | |
| JT1 | 125 |
| JT2 | 102 |
| JT3 | 85 |
| JT4 | 105 |
| JT5 | 120 |
| JT6 | 200 |
| Montaż | |
| podłogowy | TAK |
| odwrotny | NIE |
| na ścianie | NIE |
| na półce | NIE |
| Kontroler | E02 |
 |
Opis robota:Robot serii BX wyposażony jest w szybsze i bardziej sprawne serwonapędy co w połączeniu z kompaktową budową i lekkimi materiałami użytymi do budowy elementów ramion pozwoliło uzyskać szybkiego i zwinnego robota. Niespotykanie małe wymiary montażowe to dodatkowa cecha, która pozwala na montaż tych robotów w szczególnie małych przestrzeniach roboczych. Zaawansowana funkcja stabilizacji drgań ramienia pozwala skrócić czas cyklu. |
Przestrzeń robocza Pobierz obrazek w wysokiej rozdzielczości |
| BX250L | |
|---|---|
| Waga robota [kg] | 1460 |
| Maksymalny udźwig [kg] | 250 |
| Maksymalny zasięg [mm] | 2812 |
| Ilość stopni swobody | 6 |
| Powtarzalność [mm] | +/- 0.07 |
| Zakres ruchu [°] | |
| JT1 | +/- 180 |
| JT2 | +76 ~ -60 |
| JT3 | +90 ~ -120 |
| JT4 | +/-210 |
| JT5 | +/-125 |
| JT6 | +/-210 |
| Prędkości [°/s] | |
| JT1 | 125 |
| JT2 | 120 |
| JT3 | 100 |
| JT4 | 140 |
| JT5 | 140 |
| JT6 | 200 |
| Montaż | |
| podłogowy | TAK |
| odwrotny | NIE |
| na ścianie | NIE |
| na półce | NIE |
| Kontroler | E02 |
| Stopień Ochrony IP | IP65 |
 |
Opis robota:Robot serii BX wyposażony jest w szybsze i bardziej sprawne serwonapędy co w połączeniu z kompaktową budową i lekkimi materiałami użytymi do budowy elementów ramion pozwoliło uzyskać szybkiego i zwinnego robota. Niespotykanie małe wymiary montażowe to dodatkowa cecha, która pozwala na montaż tych robotów w szczególnie małych przestrzeniach roboczych. Zaawansowana funkcja stabilizacji drgań ramienia pozwala skrócić czas cyklu. |
Przestrzeń robocza Pobierz obrazek w wysokiej rozdzielczości |
| BX300L | |
|---|---|
| Waga robota [kg] | 1460 |
| Maksymalny udźwig [kg] | 300 |
| Maksymalny zasięg [mm] | 2812 |
| Ilość stopni swobody | 6 |
| Powtarzalność [mm] | +/- 0.07 |
| Zakres ruchu [°] | |
| JT1 | +/- 180 |
| JT2 | +76 ~ -60 |
| JT3 | +90 ~ -120 |
| JT4 | +/-210 |
| JT5 | +/-125 |
| JT6 | +/-210 |
| Prędkości [°/s] | |
| JT1 | 125 |
| JT2 | 102 |
| JT3 | 85 |
| JT4 | 105 |
| JT5 | 110 |
| JT6 | 180 |
| Montaż | |
| podłogowy | TAK |
| odwrotny | NIE |
| na ścianie | NIE |
| na półce | NIE |
| Kontroler | E02 |
| Stopień Ochrony IP | IP65 |

Zostaw wiadomość lub zadaj pytanie – odpowiemy niezwłocznie.


Napisz do nas - odpowiemy w ciągu 24h
Potrzebujesz pomocy? Skontaktuj się z nami. Odpowiemy na wszystkie Twoje pytania.
Szkolenie z zaawansowanych metod programowania robotów Kawasaki
Szkolenie z uruchomienia, obsługi i programowania robotów Astorino dla Użytkowników
WIŚNIOWSKI - cyfrowa indywidualizacja w fabryce przyszłości
Pierwsze w Polsce nowoczesne laboratorium sterowania i automatyki Astraada One na AGH w Krakowie
Nowoczesna produkcja wsadowa w zakładach chemicznych Stepan

Firma ASTOR od 30 lat wspiera podnoszenie efektywności procesów w przemyśle, produkcji oraz infrastrukturze dostarczając komponenty automatyki przemysłowej, robotyki, systemy IT oraz wiedzę biznesową i techniczną. Kierunek wspierania rozwoju i transformacji naszych Klientów wyznacza Przemysł 4.0. W naszym portfolio znajdują się systemy sterowania Emerson Industrial Automation&Control (dawniej GE Intelligent Platforms, GE Fanuc), Horner APG oraz Astraada One, oprogramowanie przemysłowe AVEVA (dawniej Wonderware), roboty przemysłowe Kawasaki i Epson, produkty do bezprzewodowej transmisji danych SATEL Oy i Astraada, a także falowniki, panele HMI i urządzenia sieciowe Astraada. Oferujemy usługi doradcze w ramach ASTOR Consulting i szkolenia w ramach Akademii ASTOR.

 Roboty do szkół
Roboty do szkół




 12 428 63 00
12 428 63 00


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}