
Roboty Kawasaki Robotics serii K przeznaczone są do aplikacji malarskich. Specjalna konstrukcja umożliwia bezpieczną pracę w strefach zagrożonych wybuchem. Budowa kiści robota Kawasaki Robotics pozwala na prowadzenie przewodów wewnątrz, a to zapewnia swobodę, płynność ruchów i bezpieczeństwo, gwarantując najwyższą jakość malowania.
Roboty Kawasaki Robotics serii K mogą być programowane na dwa sposoby, za pomocą ręcznego programatora lub komputera oraz przy użyciu jednej z dwóch metod programowania Block Step lub AS. Programowanie robotów za pomocą Block Step eliminuje czasochłonną fazę uczenia się programu przy użyciu oprogramowania do automatycznego generowania ścieżek. Język AS zapewnia maksymalną elastyczność dzięki plikom tekstowym dowolnego programu aż do edycji tekstu i pozwala programiście tworzyć zaawansowaną logikę, manipulować pozycjami programu, integrować komponenty peryferyjne i sterować procesem aplikacji.
Prosta integracja systemu ułatwia łączność z urządzeniami peryferyjnymi. Natomiast jednostka sterująca to intuicyjny graficzny interfejs, który umożliwia użytkownikowi centralną obsługę i sterowanie wszystkimi elementami systemu malowania robota.
Ramię robota Kawasaki Robotics serii K z wgłębionym nadgarstkiem można wyposażyć w wewnętrzne węże, aby zminimalizować przywieranie mgiełki farby do rur i zmniejszyć ryzyko zanieczyszczenia farby. Wewnętrzna średnica wydrążonego nadgarstka robota Kawasaki Robotics wynosi 70mm.

Kontroler Kawasaki Robotics E4x Paint
Kontroler Kawasaki Robotics E4x ma duże gabaryty i wysoką wagę. Dedykowany jest do stref niebezpiecznych, zagrożonych wybuchem. Kontrolery E45 i E47 obsługują serie robotów malarskich Kawasaki Robotics serii K.
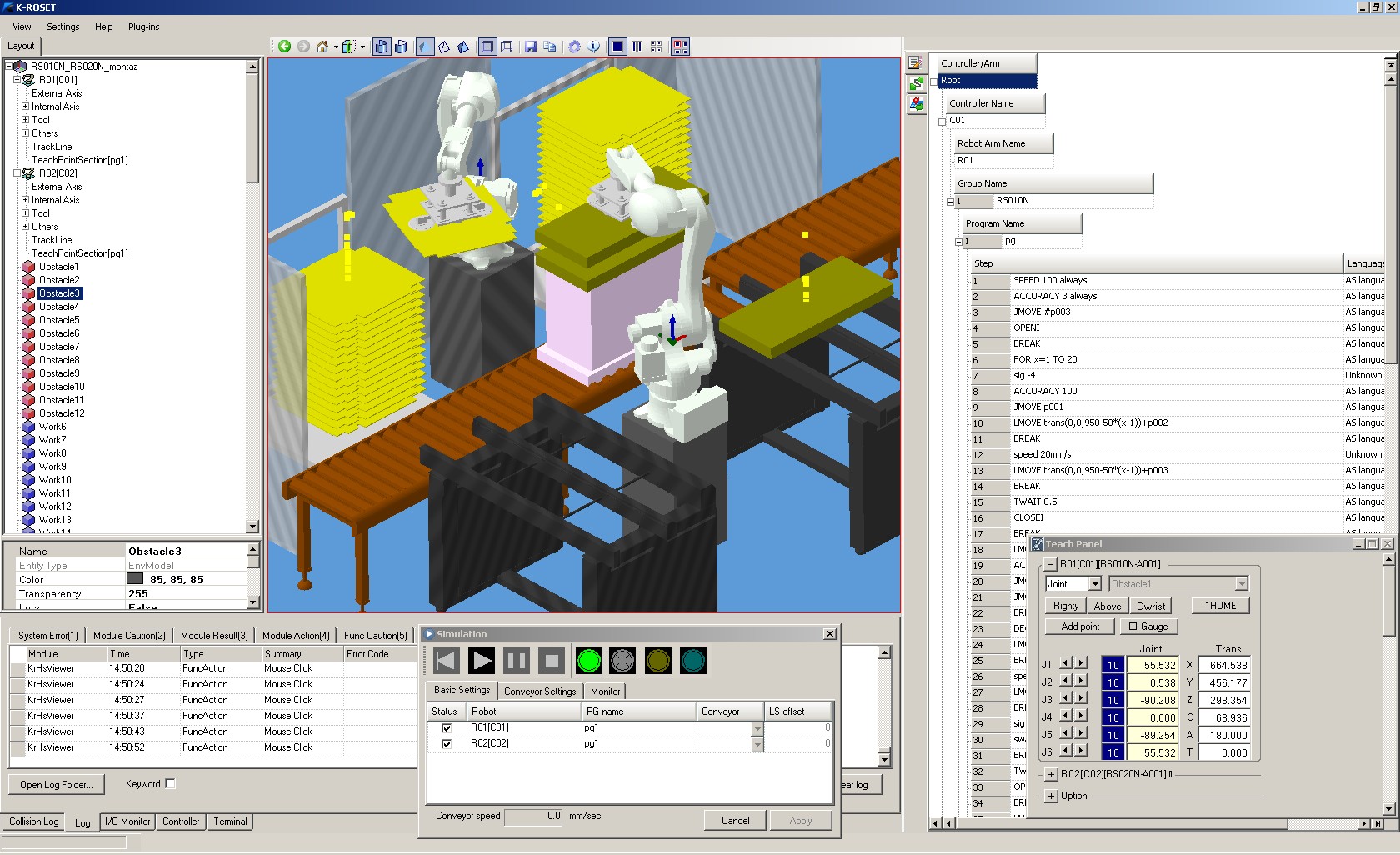
K-Roset to symulator zrobotyzowanych stanowisk pracy z robotami Kawasaki Robotics. W prosty i przejrzysty sposób pozwala na stworzenie symulacji, wykorzystując roboty z oferty Kawasaki Robotics.
Program umożliwiający zaawansowaną pracę z robotami Kawasaki Robotics. Pozwala na realizację komunikacji terminalowej, kompleksowe tworzenie oraz modyfikowanie aplikacji. Posiada wbudowany edytor tekstowy, dzięki któremu można w wygodny sposób tworzyć programy.
CS-Configurator to program umożliwiający konfigurację funkcji bezpieczeństwa dostępnych w module Cubic-s dla robotów Kawasaki Robotics. Moduł ten odpowiada za monitorowanie ruchu robota Kawasaki Robotics – a w sytuacji, w której zostanie zarejestrowany ruch niedozwolony, robot zostaje zatrzymany awaryjnie.

Zrobotyzowane malowanie stosuje się wszędzie tam, gdzie wymagana jest najwyższa jakość pomalowanej powierzchni i wydajność. Roboty Kawasaki Robotics gwarantują stałe parametry malowanych powierzchni oraz dużą wydajność. Ważnym aspektem jest również ochrona zdrowia pracowników.
Czytaj więcej.
W tym zastosowaniu roboty przemysłowe Kawasaki Robotics współpracują z dodatkowym wyposażeniem do przechowywania, przepompowywania oraz aplikowania substancji nakładanej. Systemy zbiorników, pomp i regulatorów stanowią integralną cześć stanowiska, którego głównym elementem jest robot Kawasaki Robotics. To robot za pomocą pistoletu (aplikatora) nanosi daną substancję na obiekt, który dodatkowo może się poruszać.
Czytaj więcej.Kawasaki Robotics KJ - seria robotów malarskich o udźwigach 15 - 25 kg.
Kawasaki Robotics KJ194E - praca w strefie EX, zasięg 1940 mm
 |
Opis robota:Robot przeznaczony do malowania wszelkiego rodzaju powierzchi. Dzięki odpowiedniej konstrukcji można poprowadzić przewody wewnątrz kiści (fi 40 mm). Może pracować w strefie EX. |
Przestrzeń robocza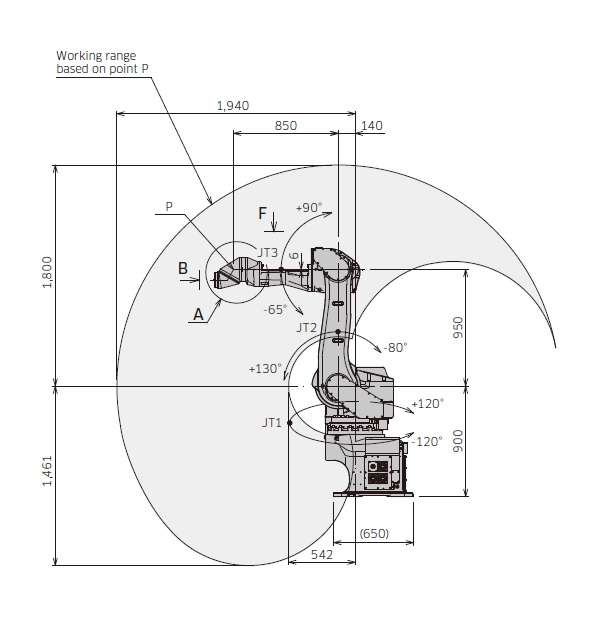 |
| KJ194E | |
|---|---|
| Waga robota [kg] | 530/540 |
| Maksymalny udźwig [kg] | 15(25) |
| Maksymalny zasięg [mm] | 1940 |
| Ilość stopni swobody | 6 |
| Powtarzalność [mm] | +/- 0.5 |
| Zakres ruchu [°] | |
| JT1 | +/- 120 |
| JT2 | 130~ -80 |
| JT3 | +90~-65 |
| JT4 | +/- 720 |
| JT5 | +/- 720 |
| JT6 | +/- 410 |
| Prędkości [°/s] | |
| Montaż | |
| podłogowy | TAK |
| odwrotny | NIE |
| na ścianie | TAK |
| na półce | TAK |
| Kontroler | E45 |
 |
Opis robota:Robot przeznaczony do malowania wszelkiego rodzaju powierzchi. Dzięki odpowiedniej konstrukcji można poprowadzić przewody wewnątrz kiści (fi 40 mm). Może pracować w strefie EX. |
Przestrzeń robocza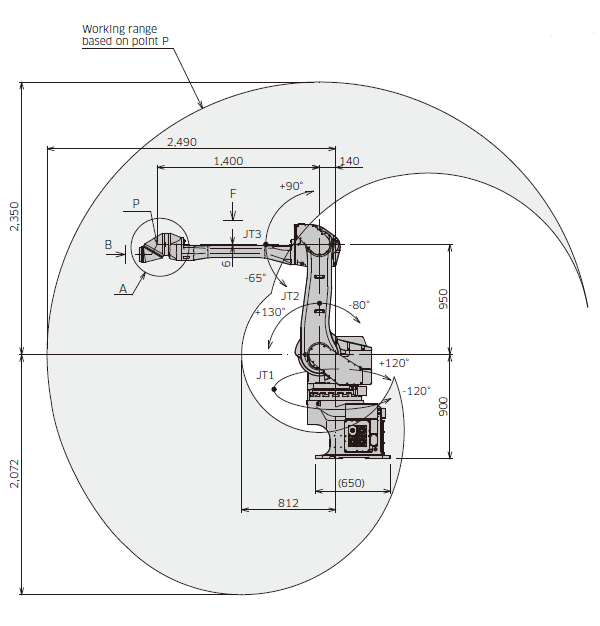 |
| KJ244E | |
|---|---|
| Waga robota [kg] | 530/540 |
| Maksymalny udźwig [kg] | 15(25) |
| Maksymalny zasięg [mm] | 2490 |
| Ilość stopni swobody | 6 |
| Powtarzalność [mm] | +/- 0.5 |
| Zakres ruchu [°] | |
| JT1 | +/- 120 |
| JT2 | 130~ -80 |
| JT3 | +90~-65 |
| JT4 | +/- 720 |
| JT5 | +/- 720 |
| JT6 | +/- 410 |
| Prędkości [°/s] | |
| Montaż | |
| podłogowy | TAK |
| odwrotny | NIE |
| na ścianie | TAK |
| na półce | TAK |
| Kontroler | E45 |
 |
Opis robota:Robot przeznaczony do malowania wszelkiego rodzaju powierzchi. Dzięki odpowiedniej konstrukcji można poprowadzić przewody wewnątrz kiści (fi 40 mm). Może pracować w strefie EX. |
Przestrzeń robocza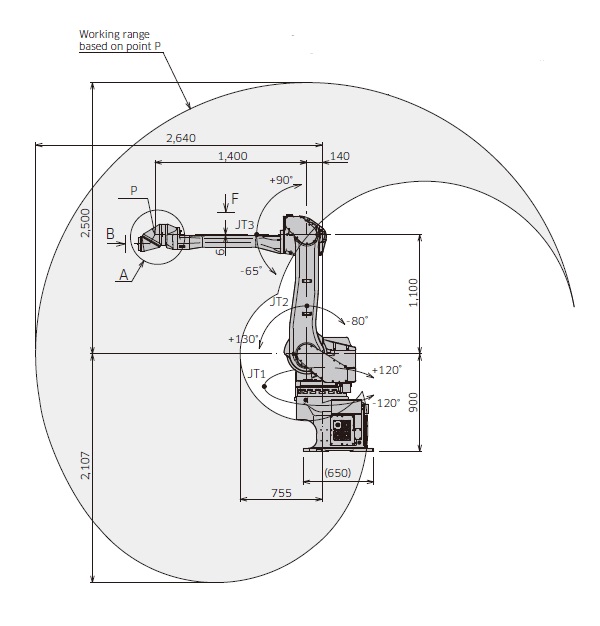 |
| KJ264E | |
|---|---|
| Waga robota [kg] | 540 |
| Maksymalny udźwig [kg] | 15(25) |
| Maksymalny zasięg [mm] | 2640 |
| Ilość stopni swobody | 6 |
| Powtarzalność [mm] | +/- 0.5 |
| Zakres ruchu [°] | |
| JT1 | +/- 120 |
| JT2 | 130~ -80 |
| JT3 | +90~-65 |
| JT4 | +/- 720 |
| JT5 | +/- 720 |
| JT6 | +/- 410 |
| Prędkości [°/s] | |
| Montaż | |
| podłogowy | TAK |
| odwrotny | NIE |
| na ścianie | TAK |
| na półce | TAK |
| Kontroler | E45 |
 |
Opis robota:Robot przeznaczony do malowania wszelkiego rodzaju powierzchi. Dzięki odpowiedniej konstrukcji można poprowadzić przewody wewnątrz kiści (fi 40 mm). Może pracować w strefie EX. |
Przestrzeń robocza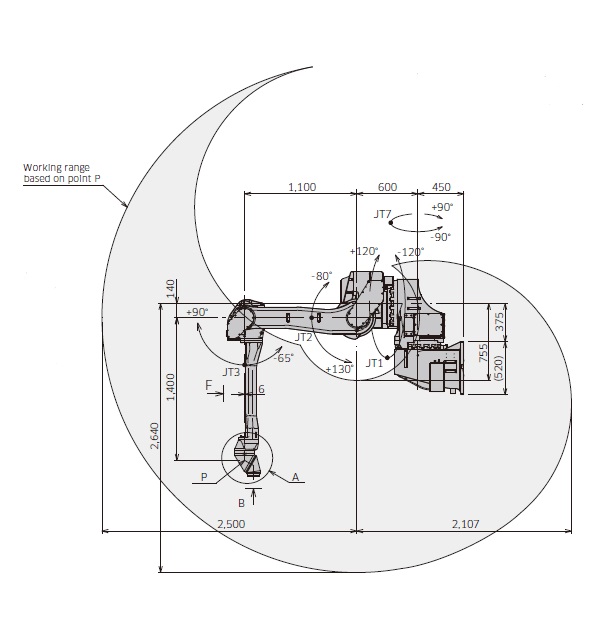 |
| KJ314 | |
|---|---|
| Waga robota [kg] | 720 |
| Maksymalny udźwig [kg] | 15(25) |
| Maksymalny zasięg [mm] | 2500 |
| Ilość stopni swobody | 7 |
| Powtarzalność [mm] | +/- 0.5 |
| Zakres ruchu [°] | |
| JT1 | +/- 120 |
| JT2 | 130~ -80 |
| JT3 | +90~-65 |
| JT4 | +/- 720 |
| JT5 | +/- 720 |
| JT6 | +/- 410 |
| JT7 | +/-90 |
| Prędkości [°/s] | |
| Montaż | |
| podłogowy | NIE |
| odwrotny | NIE |
| na ścianie | TAK |
| na półce | NIE |
| Kontroler | E45 |
KF - seria przemysłowych robotów malarskich Kawasaki Robotics o udźwigach 5 - 12 kg (kiść) i 120 kg (ramię).
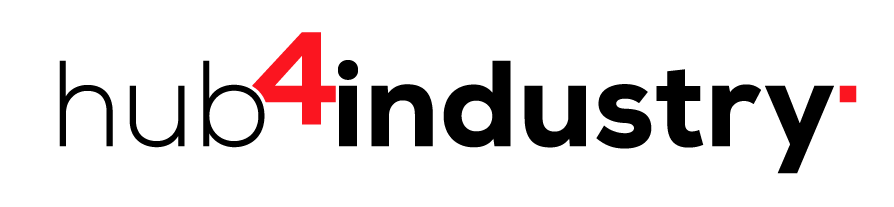
Kawasaki Robotics KF121E - praca w strefie EX, zasięg 1240 mm
 |
Opis robota:Najmniejszy z robotów przeznaczonych do pracy w strefie EX. Idealnie nadaje się do malowania powierzchni 2D i niedużych przedmiotów. |
Przestrzeń robocza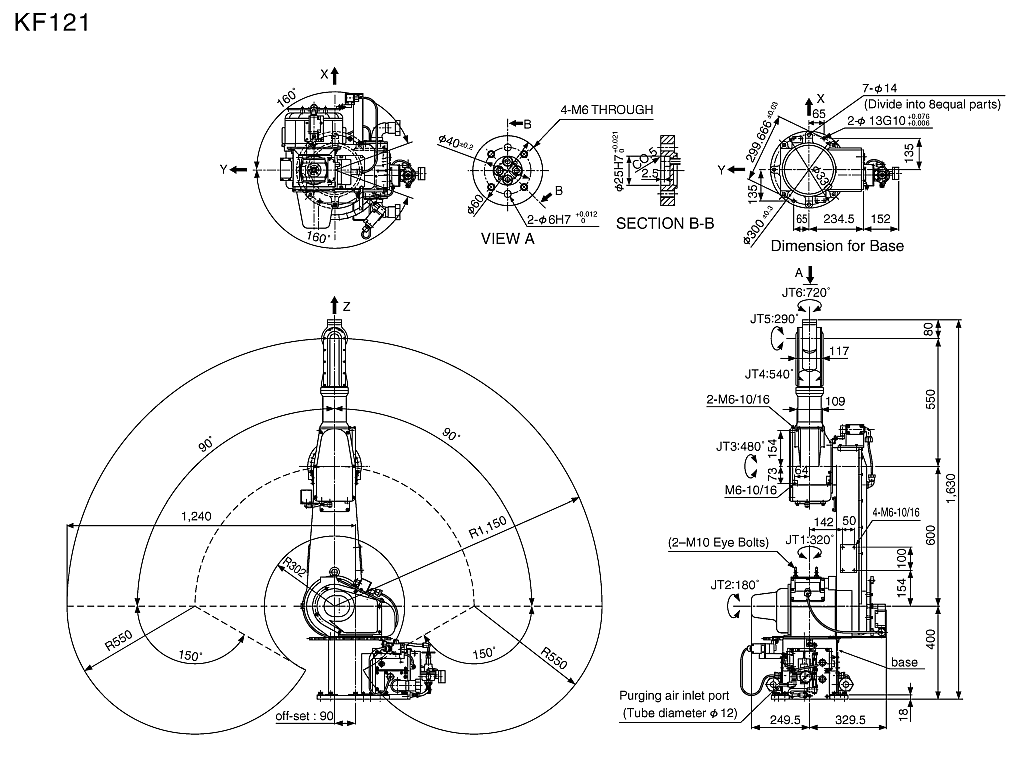 Pobierz obrazek w wysokiej rozdzielczości |
| KF121E | |
|---|---|
| Waga robota [kg] | 140 |
| Maksymalny udźwig [kg] | 5 |
| Maksymalny zasięg [mm] | 1240 |
| Ilość stopni swobody | 6 |
| Powtarzalność [mm] | +/-0.2 |
| Zakres ruchu [°] | |
| JT1 | +/- 160 |
| JT2 | +/- 90 |
| JT3 | +/- 150 |
| JT4 | +/- 270 |
| JT5 | +/- 145 |
| JT6 | +/- 360 |
| Prędkości [°/s] | |
| JT1 | 220 |
| JT2 | 120 |
| JT3 | 240 |
| JT4 | 430 |
| JT5 | 430 |
| JT6 | 720 |
| Montaż | |
| podłogowy | TAK |
| odwrotny | TAK |
| na ścianie | OPCJA |
| na półce | TAK |
| Kontroler | E47 |
 |
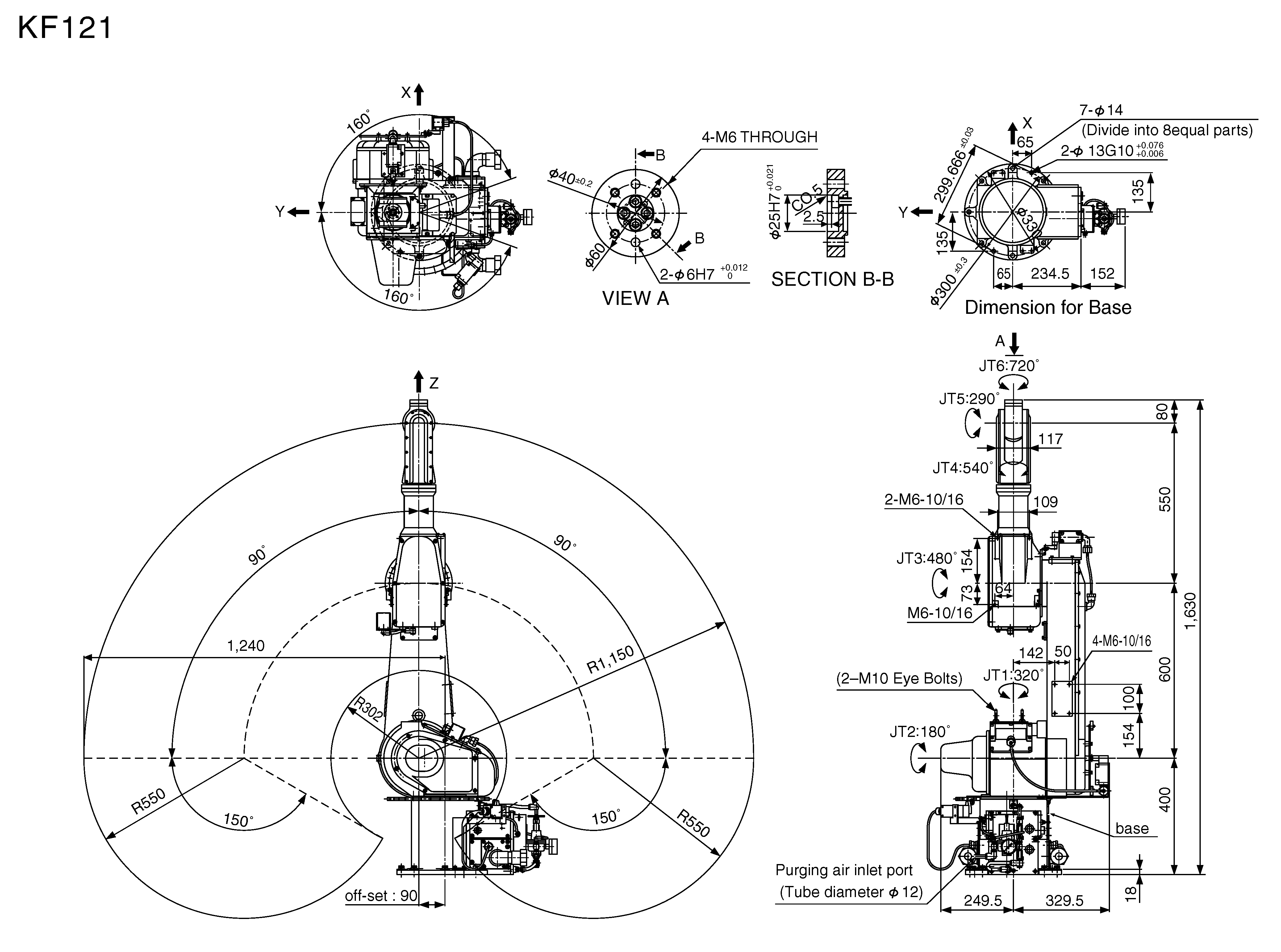
Opis robota:Robot przeznaczony do malowania wszelkiego rodzaju powierzchi. Specjalna konstrukcja pozwala mu na pracę w strefie EX. Gdy potrzebny jest większy zasięg, można użyć robota KF262E. |
Przestrzeń robocza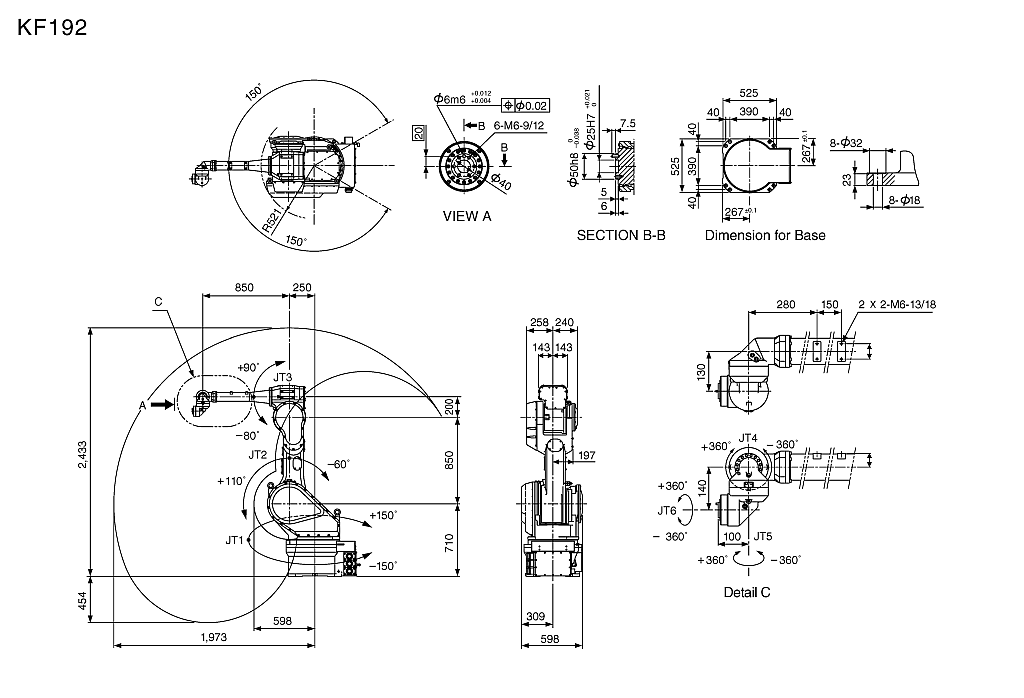 Pobierz obrazek w wysokiej rozdzielczości |
| KF192E | |
|---|---|
| Waga robota [kg] | 690 |
| Maksymalny udźwig [kg] | 12(20) |
| Maksymalny zasięg [mm] | 1973 |
| Ilość stopni swobody | 6 |
| Powtarzalność [mm] | +/-0.5 |
| Zakres ruchu [°] | |
| JT1 | +/- 150 |
| JT2 | +110~-60 |
| JT3 | +90~-80 |
| JT4 | +/- 360 |
| JT5 | +/- 360 |
| JT6 | +/- 360 |
| Prędkości [°/s] | |
| Montaż | |
| podłogowy | TAK |
| odwrotny | NIE |
| na ścianie | NIE |
| na półce | TAK |
| Kontroler | E45 |
 |
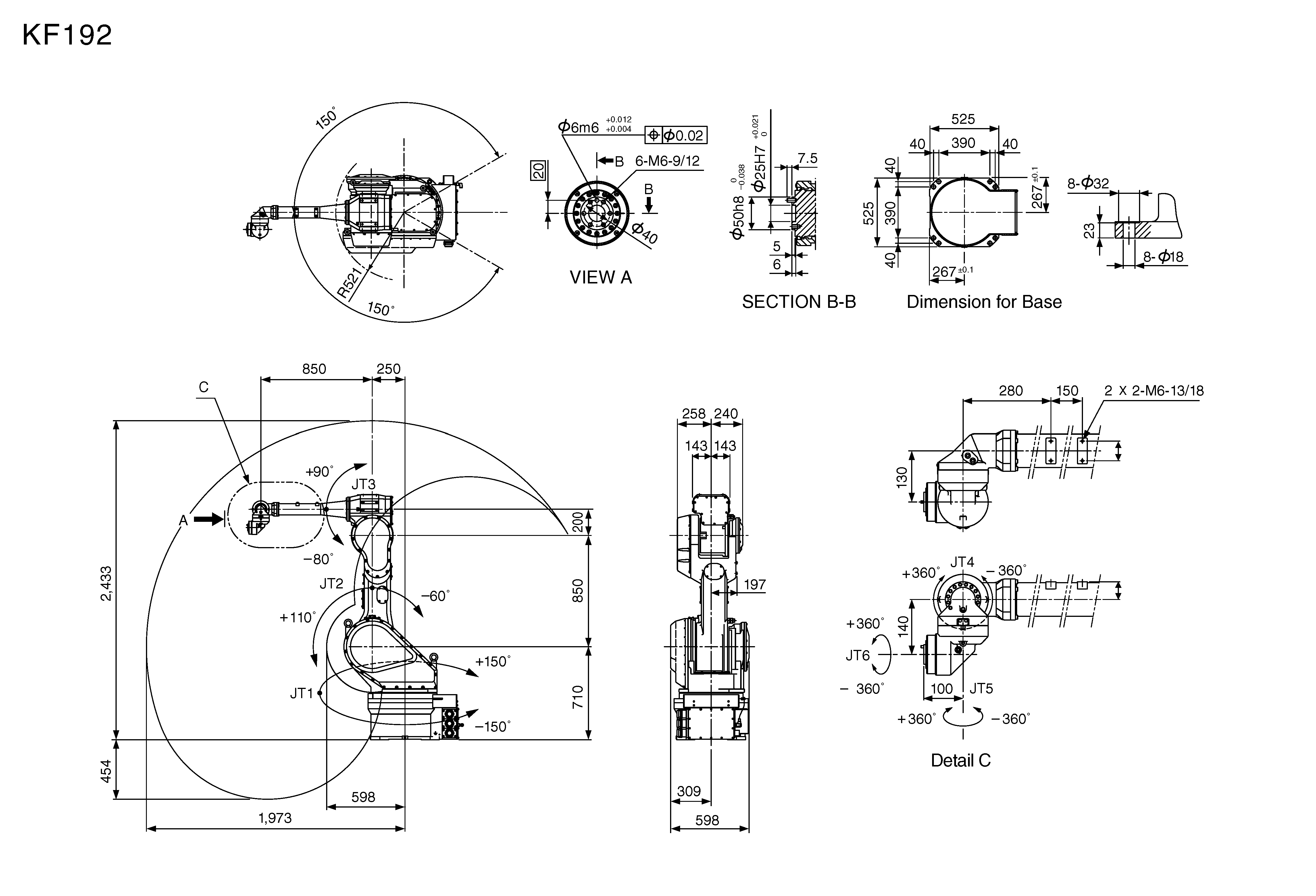
Opis robota:Robot przeznaczony do malowania wszelkiego rodzaju powierzchi. Dzięki odpowiedniej konstrukcji można poprowadzić przewody wewnątrz kiści. Może pracować w strefie EX. Gdy potrzebny jest większy zasięg można użyc robotów: KF263E lub KF264E. |
Przestrzeń robocza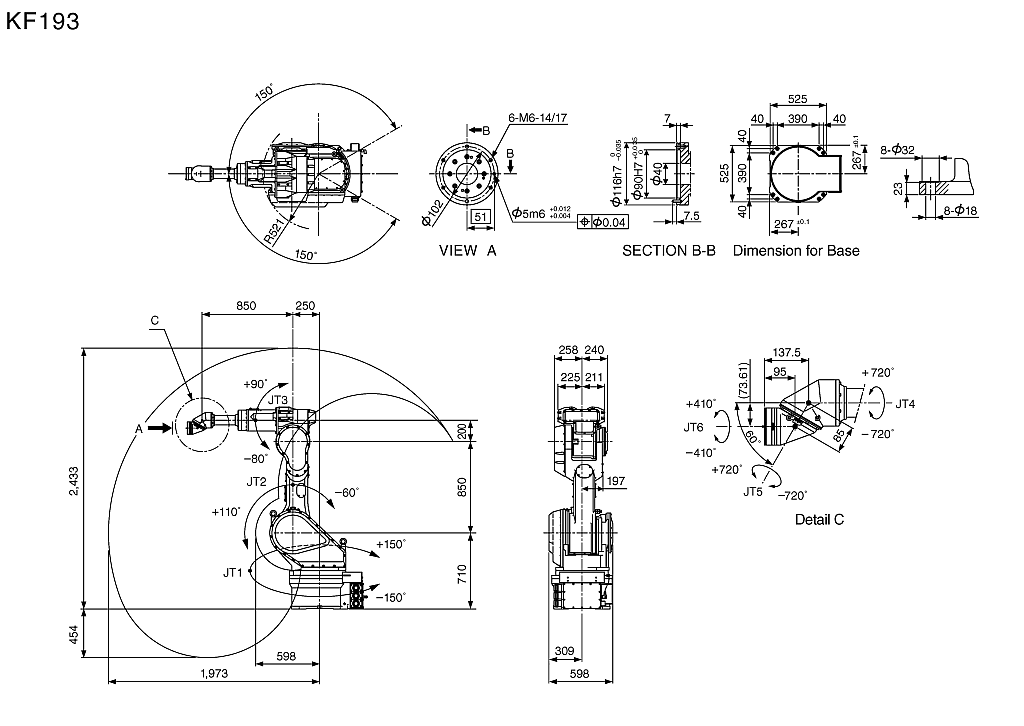 Pobierz obrazek w wysokiej rozdzielczości |
| KF193E | |
|---|---|
| Waga robota [kg] | 720 |
| Maksymalny udźwig [kg] | 12(20) |
| Maksymalny zasięg [mm] | 1973 |
| Ilość stopni swobody | 6 |
| Powtarzalność [mm] | +/-0.5 |
| Zakres ruchu [°] | |
| JT1 | +/- 150 |
| JT2 | +110~-60 |
| JT3 | +90~-80 |
| JT4 | +/- 720 |
| JT5 | +/- 720 |
| JT6 | +/- 410 |
| Prędkości [°/s] | |
| Montaż | |
| podłogowy | TAK |
| odwrotny | NIE |
| na ścianie | NIE |
| na półce | TAK |
| Kontroler | E45 |
|
Opis robota:Robot przeznaczony do malowania wszelkiego rodzaju powierzchi. Dzięki odpowiedniej konstrukcji można poprowadzić przewody wewnątrz kiści. Może pracować w strefie EX. Gdy potrzebny jest większy zasięg można użyc robotów: KF263E lub KF264E. |
Przestrzeń roboczaPobierz obrazek w wysokiej rozdzielczości |
| KF193E | |
|---|---|
| Waga robota [kg] | 720 |
| Maksymalny udźwig [kg] | 12(20) |
| Maksymalny zasięg [mm] | 1973 |
| Ilość stopni swobody | 6 |
| Powtarzalność [mm] | +/-0.5 |
| Zakres ruchu [°] | |
| JT1 | +/- 150 |
| JT2 | +110~-60 |
| JT3 | +90~-80 |
| JT4 | +/- 720 |
| JT5 | +/- 720 |
| JT6 | +/- 410 |
| Prędkości [°/s] | |
| Montaż | |
| podłogowy | TAK |
| odwrotny | NIE |
| na ścianie | NIE |
| na półce | TAK |
| Kontroler | E45 |
 |
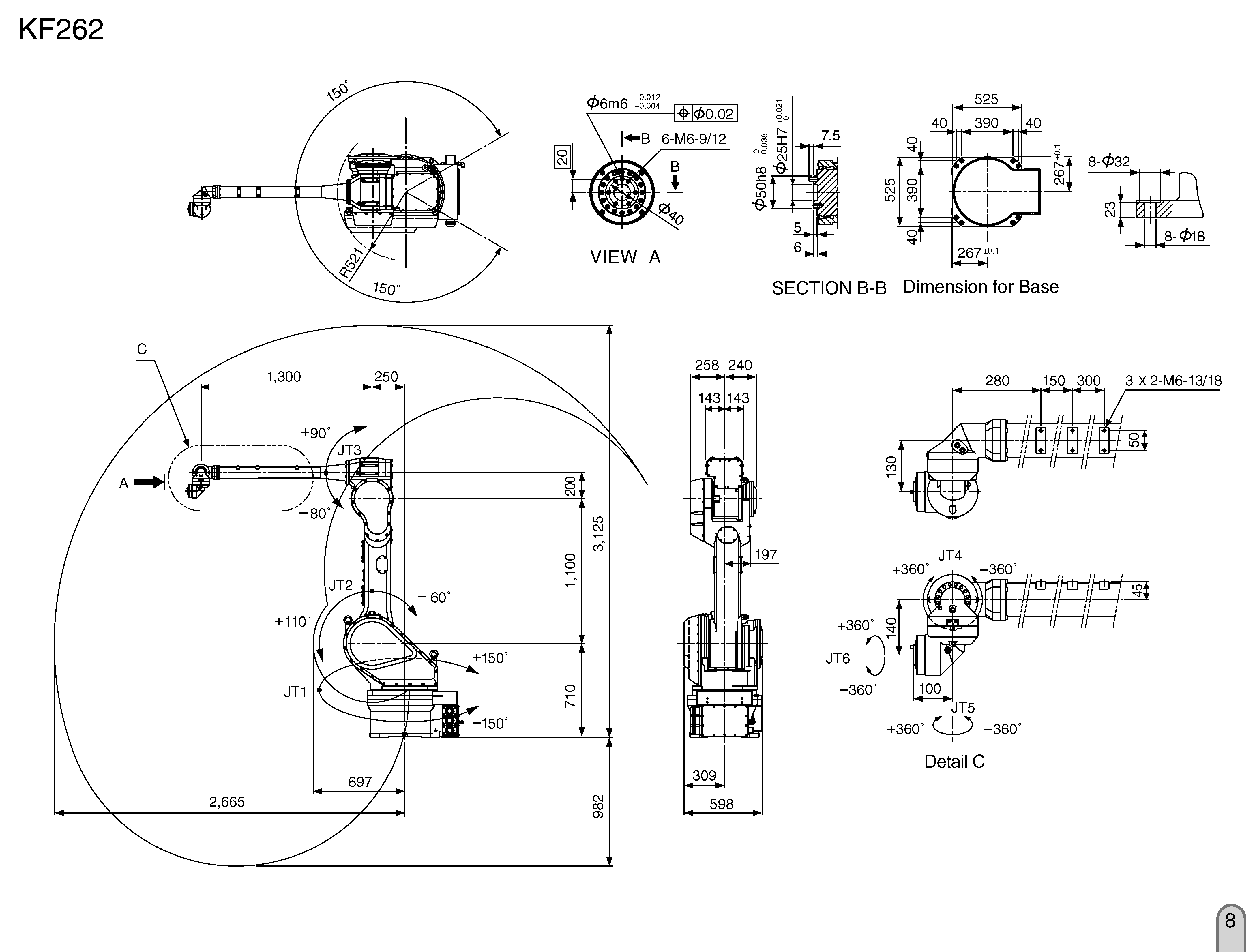
Opis robota:Robot przeznaczony do malowania wszelkiego rodzaju powierzchi. Specjalna konstrukcja pozwala mu na pracę w strefie EX. |
Przestrzeń robocza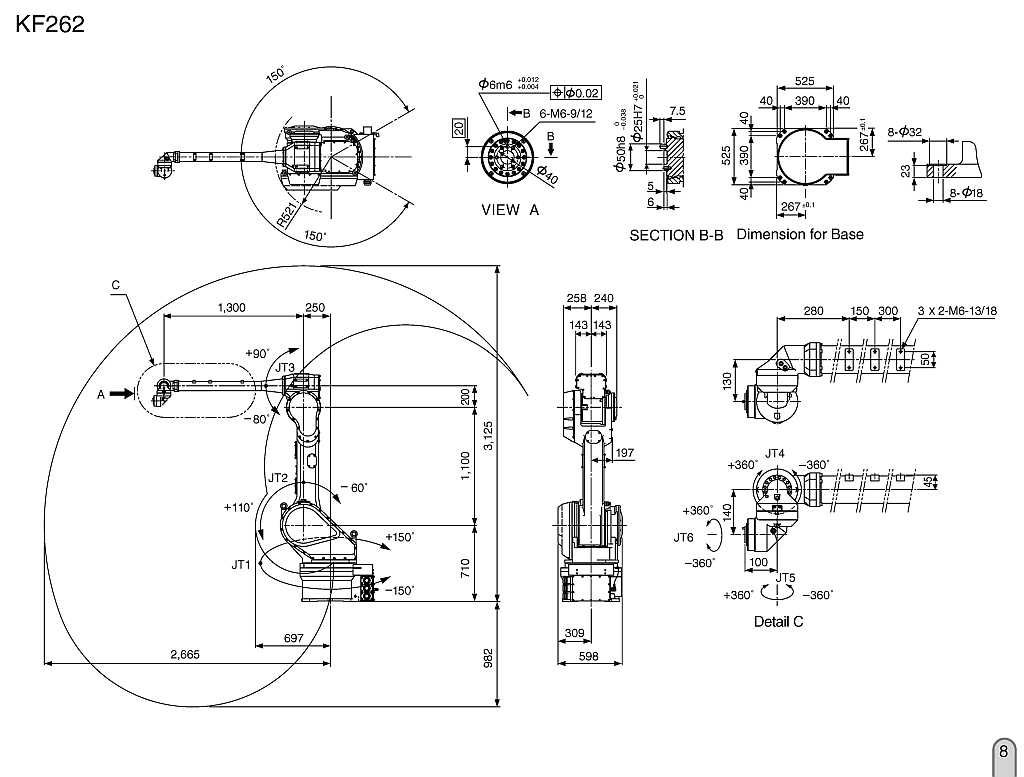 Pobierz obrazek w wysokiej rozdzielczości |
| KF262E | |
|---|---|
| Waga robota [kg] | 720 |
| Maksymalny udźwig [kg] | 12(20) |
| Maksymalny zasięg [mm] | 2665 |
| Ilość stopni swobody | 6 |
| Powtarzalność [mm] | +/-0.5 |
| Zakres ruchu [°] | |
| JT1 | +/- 150 |
| JT2 | +110~-60 |
| JT3 | +90~-80 |
| JT4 | +/- 360 |
| JT5 | +/- 360 |
| JT6 | +/- 360 |
| Prędkości [°/s] | |
| Montaż | |
| podłogowy | TAK |
| odwrotny | NIE |
| na ścianie | NIE |
| na półce | TAK |
| Kontroler | E45 |
 |
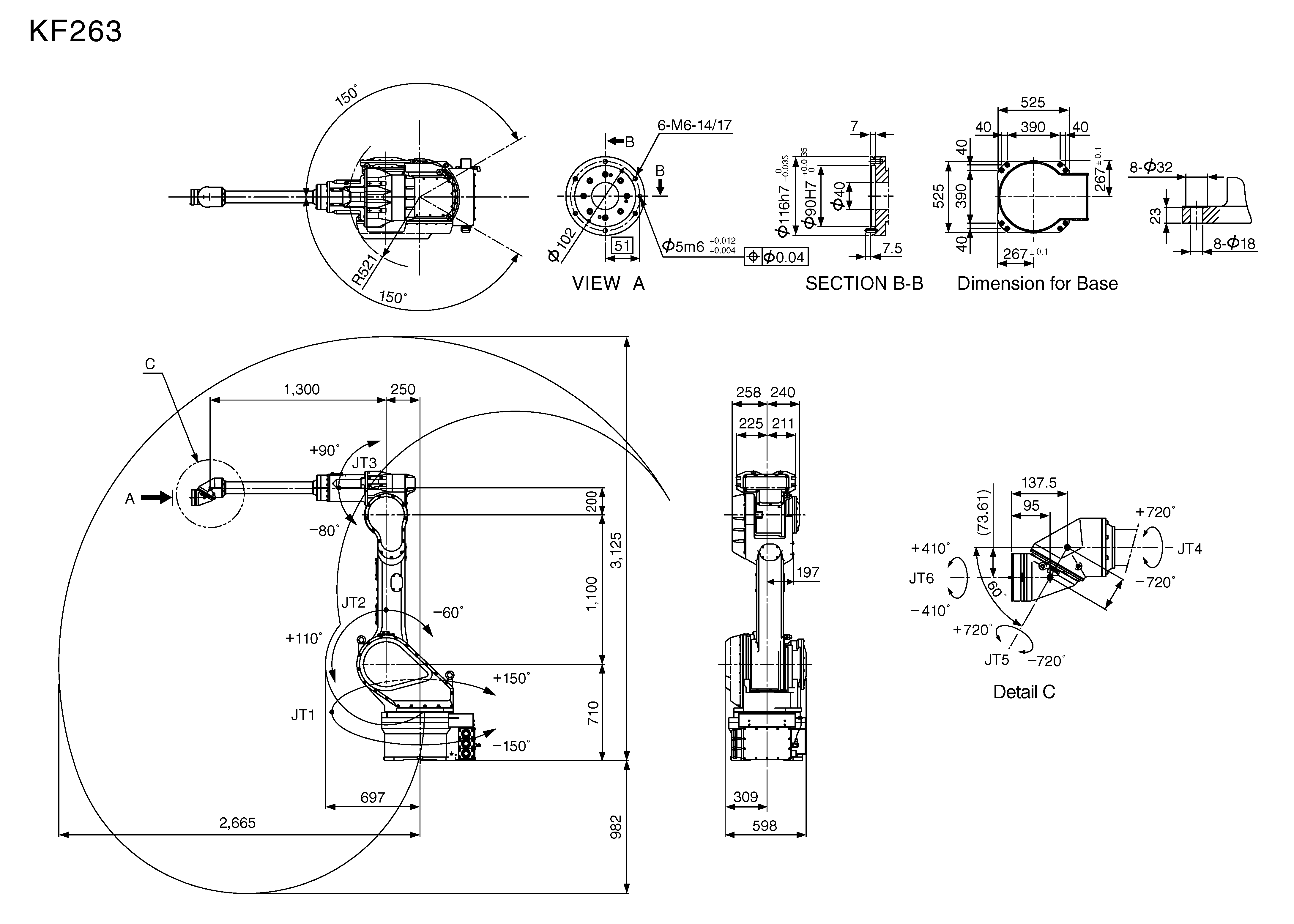
Opis robota:Robot przeznaczony do malowania wszelkiego rodzaju powierzchi. Dzięki odpowiedniej konstrukcji można poprowadzić przewody wewnątrz kiści (fi 40 mm). Może pracować w strefie EX. |
Przestrzeń robocza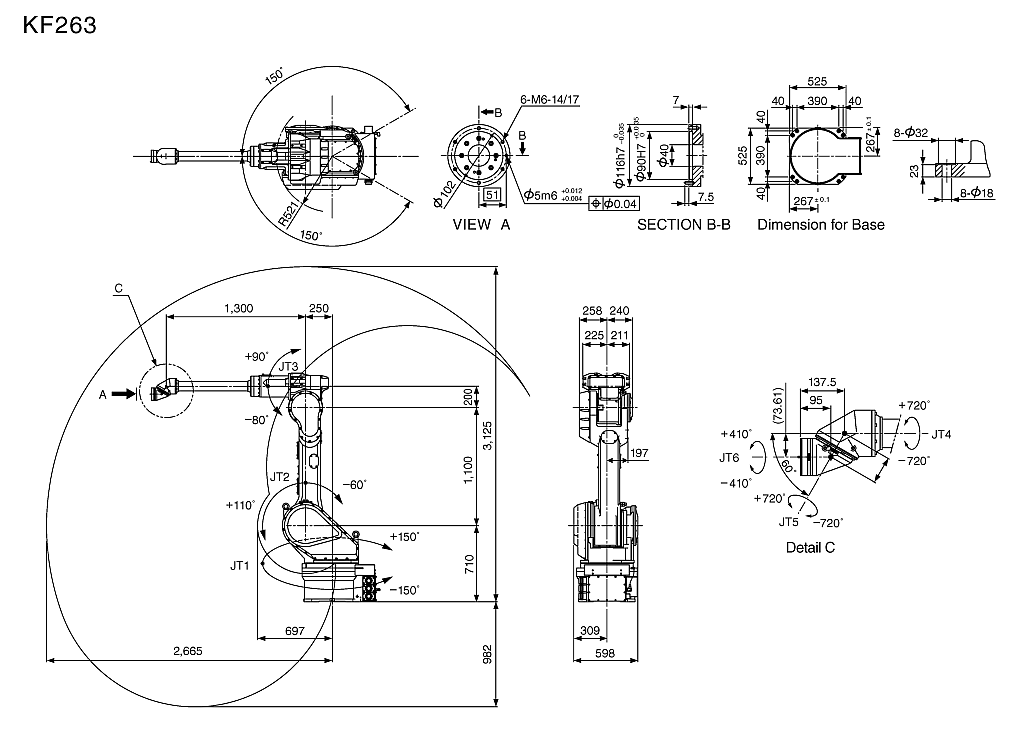 Pobierz obrazek w wysokiej rozdzielczości |
| KF263E | |
|---|---|
| Waga robota [kg] | 740 |
| Maksymalny udźwig [kg] | 12(20) |
| Maksymalny zasięg [mm] | 2665 |
| Ilość stopni swobody | 6 |
| Powtarzalność [mm] | +/-0.5 |
| Zakres ruchu [°] | |
| JT1 | +/- 150 |
| JT2 | +110~-60 |
| JT3 | +90~-80 |
| JT4 | +/- 720 |
| JT5 | +/- 720 |
| JT6 | +/- 410 |
| Prędkości [°/s] | |
| Montaż | |
| podłogowy | TAK |
| odwrotny | NIE |
| na ścianie | NIE |
| na półce | TAK |
| Kontroler | E45 |
 |
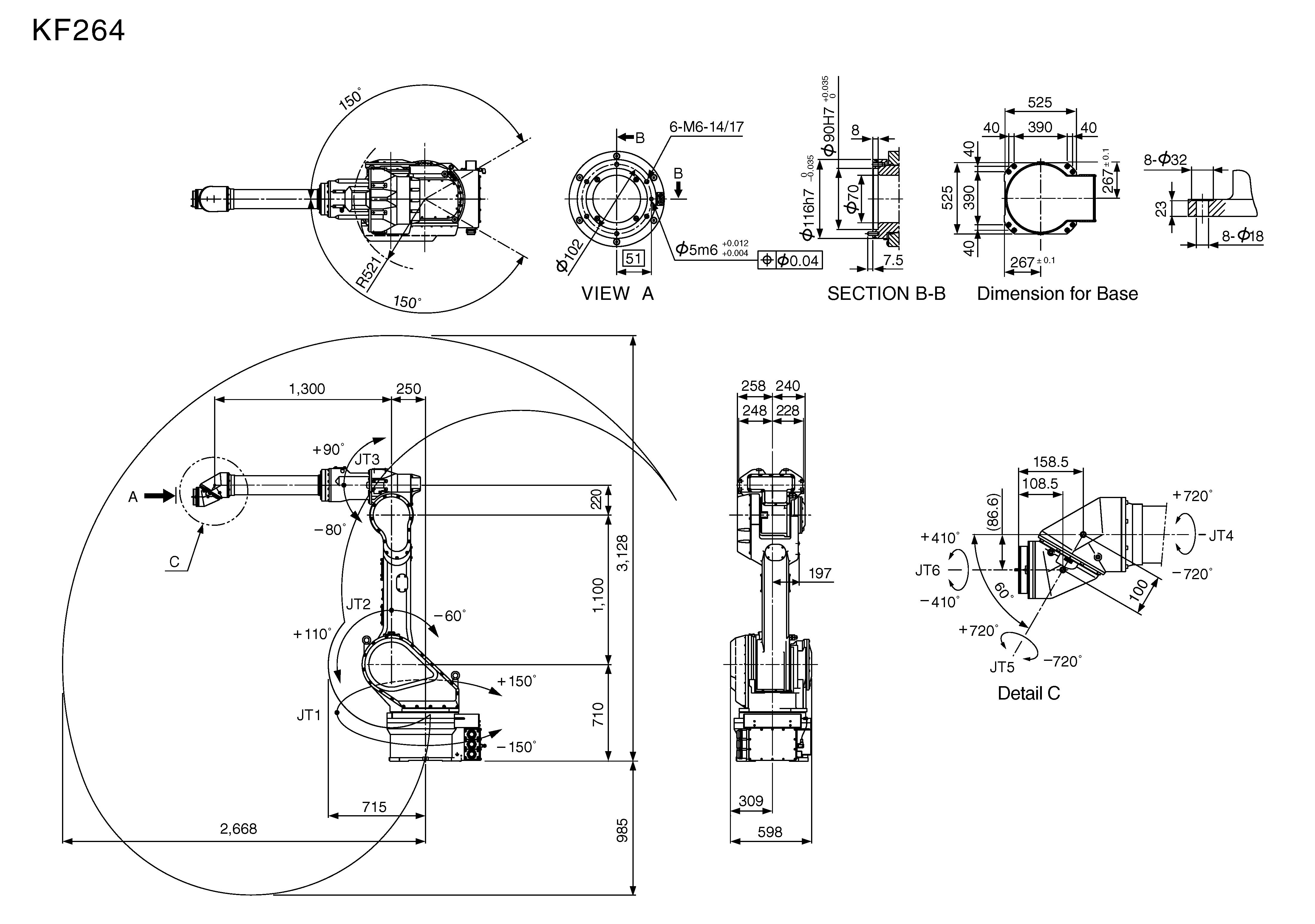
Opis robota:Robot przeznaczony do malowania wszelkiego rodzaju powierzchi. Dzięki odpowiedniej konstrukcji można poprowadzić przewody wewnątrz kiści (fi 70 mm). Może pracować w strefie EX. |
Przestrzeń robocza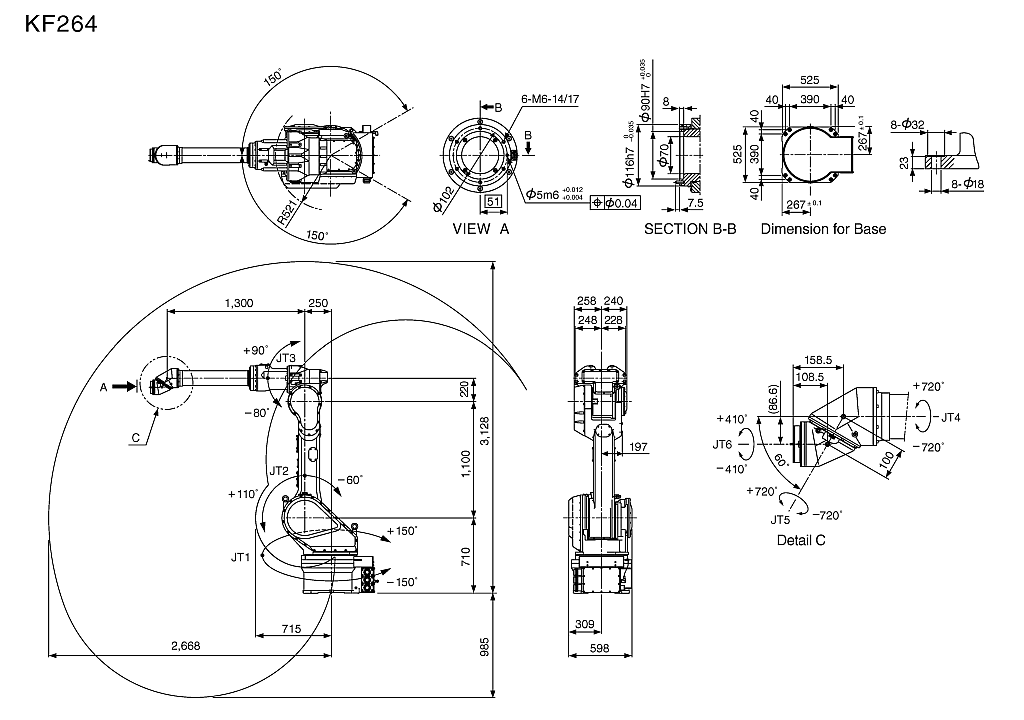 Pobierz obrazek w wysokiej rozdzielczości |
| KF264E | |
|---|---|
| Waga robota [kg] | 770 |
| Maksymalny udźwig [kg] | 12(20) |
| Maksymalny zasięg [mm] | 2668 |
| Ilość stopni swobody | 6 |
| Powtarzalność [mm] | +/-0.5 |
| Zakres ruchu [°] | |
| JT1 | +/- 150 |
| JT2 | +110~-60 |
| JT3 | +90~-80 |
| JT4 | +/- 720 |
| JT5 | +/- 720 |
| JT6 | +/- 410 |
| Prędkości [°/s] | |
| Montaż | |
| podłogowy | TAK |
| odwrotny | NIE |
| na ścianie | NIE |
| na półce | TAK |
| Kontroler | E45 |
Roboty przemysłowe Kawasaki serii KE to roboty malarskie o zwiększonym udźwigu. Moga one manipulować narzędziem o wadze do 15 kg.
Kawasaki Robotics KE610H - praca w strefie EX, zasięg 3142 mm
 |
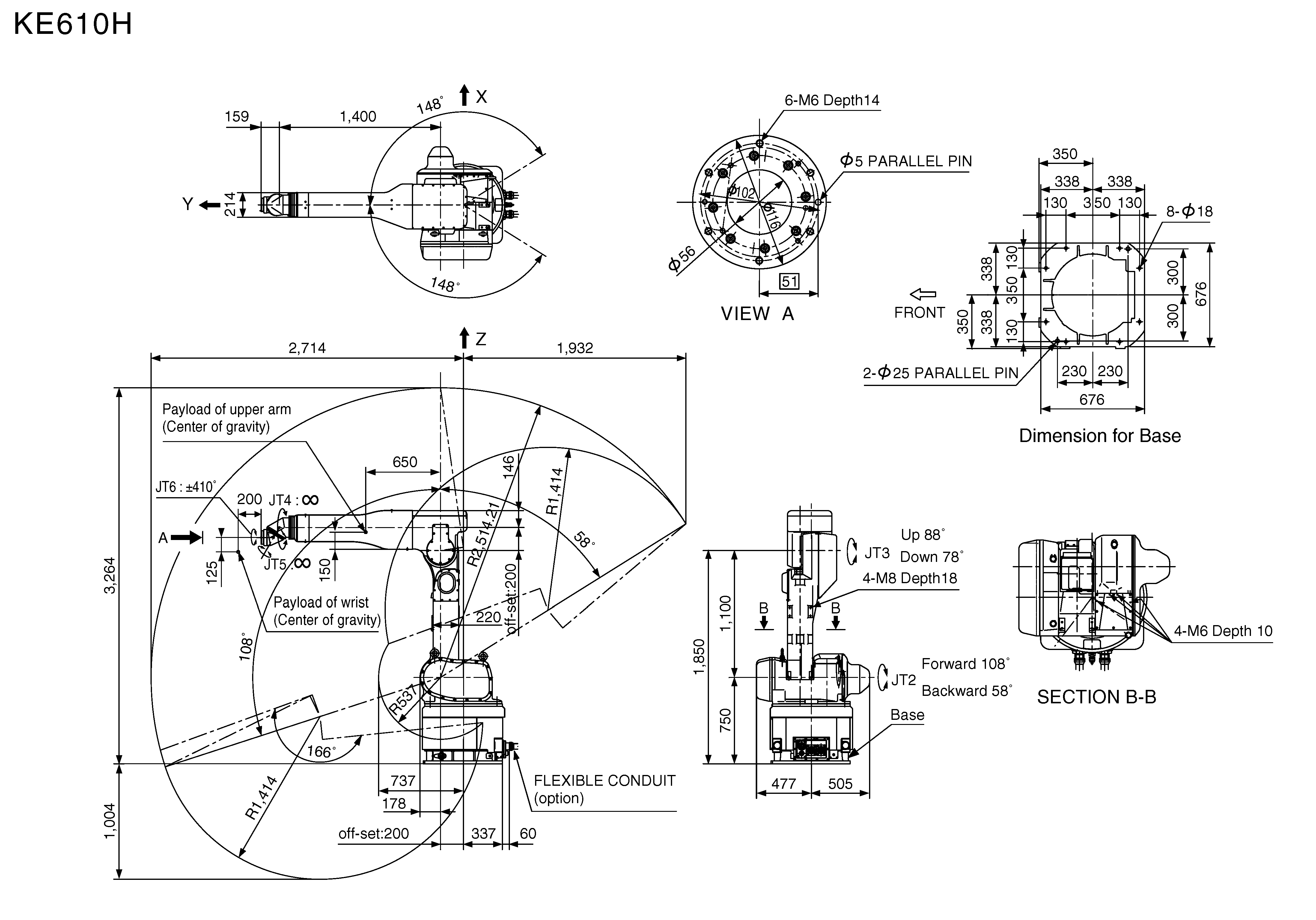
Opis robota:Robot przeznaczony do malowania wszelkiego rodzaju powierzchi. Dzięki odpowiedniej konstrukcji można poprowadzić przewody wewnątrz kiści (fi 70 mm). Może pracować w strefie EX. |
Przestrzeń robocza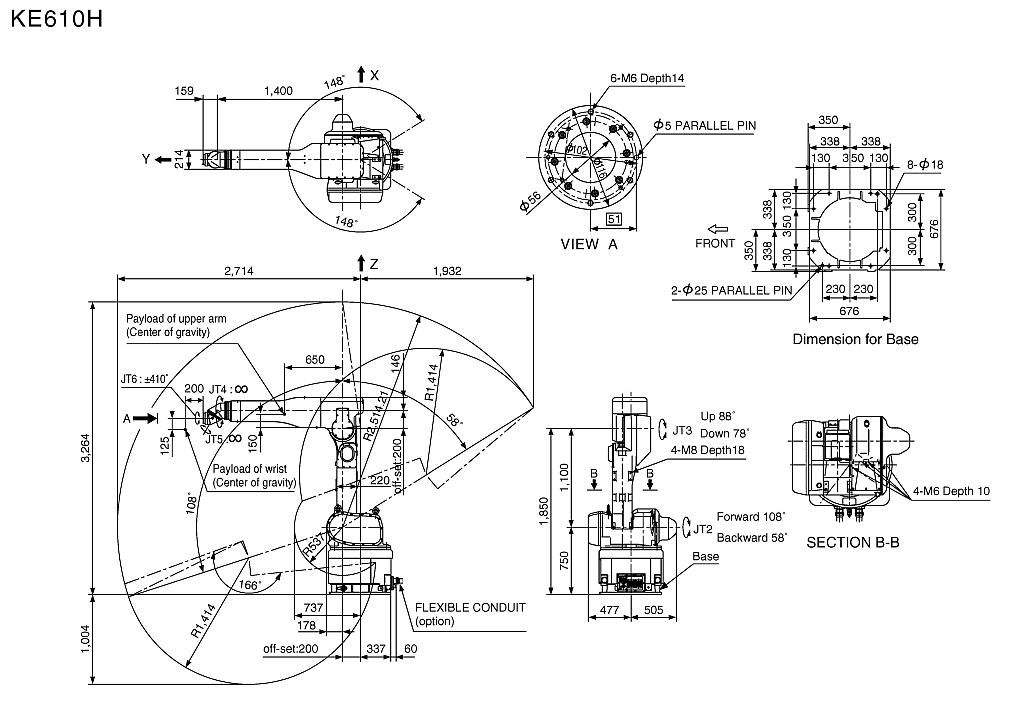 Pobierz obrazek w wysokiej rozdzielczości |
| KE610H | |
|---|---|
| Waga robota [kg] | 800 |
| Maksymalny udźwig [kg] | 15(25) |
| Maksymalny zasięg [mm] | 2714 |
| Ilość stopni swobody | 6 |
| Powtarzalność [mm] | +/-0.1 |
| Zakres ruchu [°] | |
| JT1 | +/- 148 |
| JT2 | +108~-58 |
| JT3 | +88~-78 |
| JT4 | +/- 720 |
| JT5 | +/- 720 |
| JT6 | +/- 410 |
| Prędkości [°/s] | |
| JT1 | 145 |
| JT2 | 135 |
| JT3 | 135 |
| JT4 | 420 |
| JT5 | 470 |
| JT6 | 550 |
| Montaż | |
| podłogowy | TAK |
| odwrotny | NIE |
| na ścianie | OPCJA |
| na półce | TAK |
| Kontroler | C45 |
 |
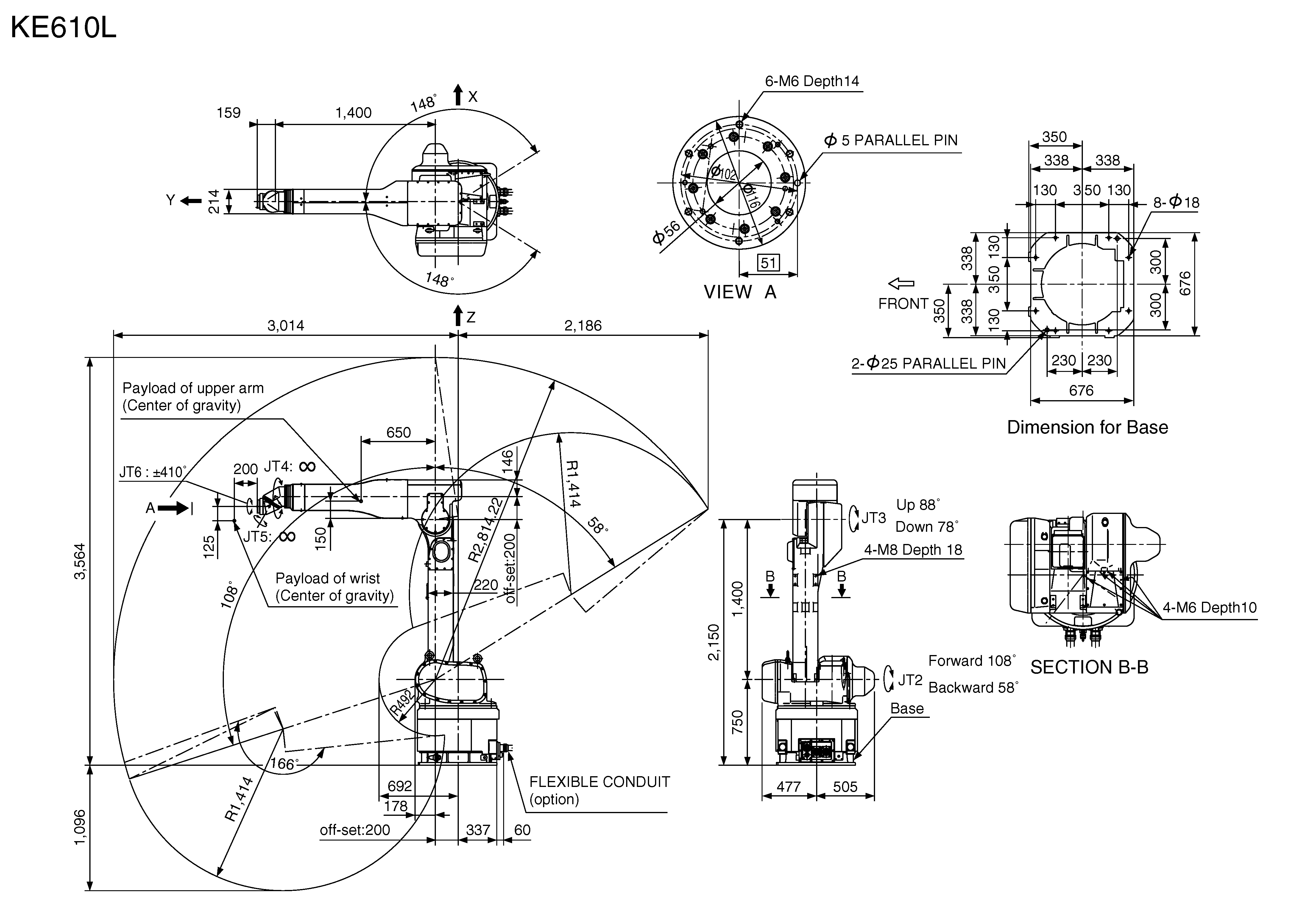
Opis robota:Robot przeznaczony do malowania wszelkiego rodzaju powierzchi. Dzięki odpowiedniej konstrukcji można poprowadzić przewody wewnątrz kiści (fi 70 mm). Może pracować w strefie EX. |
Przestrzeń robocza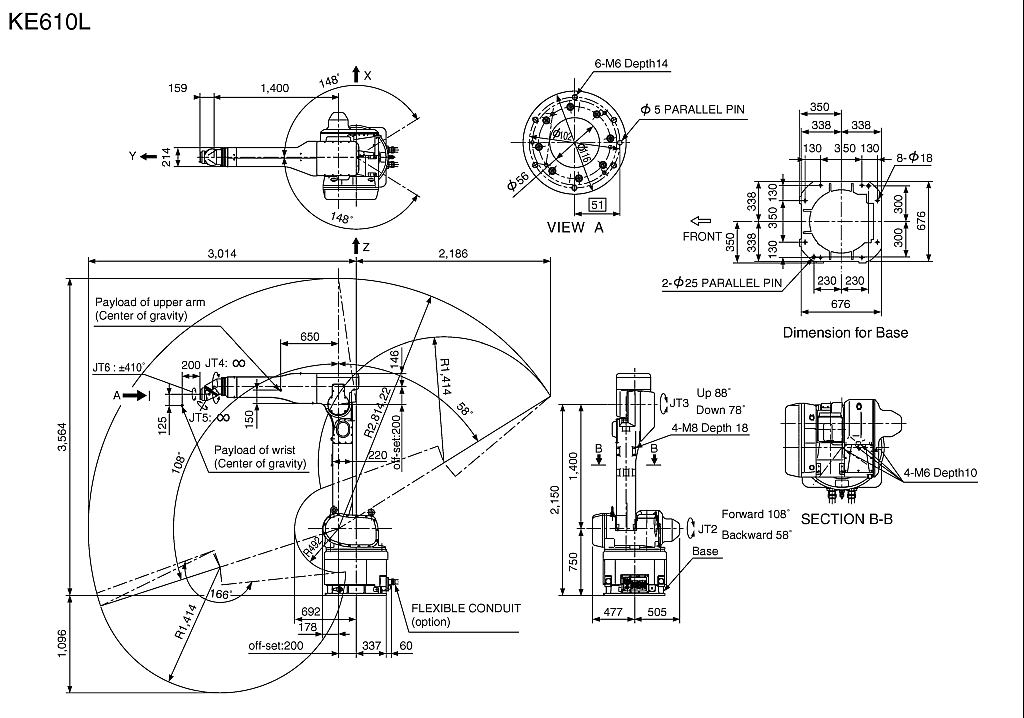 Pobierz obrazek w wysokiej rozdzielczości |
| KE610L | |
|---|---|
| Waga robota [kg] | 810 |
| Maksymalny udźwig [kg] | 15(25) |
| Maksymalny zasięg [mm] | 3014 |
| Ilość stopni swobody | 6 |
| Powtarzalność [mm] | +/-0.1 |
| Zakres ruchu [°] | |
| JT1 | +/- 148 |
| JT2 | +108~-58 |
| JT3 | +88~-78 |
| JT4 | +/- 720 |
| JT5 | +/- 720 |
| JT6 | +/- 410 |
| Prędkości [°/s] | |
| JT1 | 145 |
| JT2 | 135 |
| JT3 | 135 |
| JT4 | 420 |
| JT5 | 470 |
| JT6 | 550 |
| Montaż | |
| podłogowy | TAK |
| odwrotny | NIE |
| na ścianie | NIE |
| na półce | TAK |
| Kontroler | C45 |
Seria Kawasaki Robotics KG to roboty malarskie o zwiększonym udźwigu.
Kawasaki Robotics KG264E - praca w strefie EX, zasięg 2665 mm
 |
Opis robota:Robot Kawasaki Robotics przeznaczony do malowania wszelkiego rodzaju powierzchni. Dzięki odpowiedniej konstrukcji można poprowadzić przewody wewnątrz kiści (fi 70 mm). Może pracować w strefie EX. |
| KG264E | |
|---|---|
| Waga robota [kg] | 795 |
| Maksymalny udźwig [kg] | 20(30) |
| Maksymalny zasięg [mm] | 2665 |
| Ilość stopni swobody | 6 |
| Powtarzalność [mm] | +/-0.5 |
| Zakres ruchu [°] | |
| JT1 | +/- 120 |
| JT2 | +120~-60 |
| JT3 | +90~-65 |
| JT4 | +/- 720 |
| JT5 | +/- 720 |
| JT6 | +/- 410 |
| Prędkości [°/s] | |
| Montaż | |
| podłogowy | TAK |
| odwrotny | NIE |
| na ścianie | TAK |
| na półce | NIE |
| Kontroler | E45 |

Zostaw wiadomość lub zadaj pytanie – odpowiemy niezwłocznie.


Napisz do nas - odpowiemy w ciągu 24h
Potrzebujesz pomocy? Skontaktuj się z nami. Odpowiemy na wszystkie Twoje pytania.
Szkolenie z obsługi i programowania robotów Kawasaki cz.2 dla Użytkowników
Szkolenie ze zrobotyzowanych systemów spawalniczych Kawasaki - konfiguracja i programowanie
Szkolenie z uruchomienia, obsługi i programowania robotów Astorino dla Użytkowników
WIŚNIOWSKI - cyfrowa indywidualizacja w fabryce przyszłości
Pierwsze w Polsce nowoczesne laboratorium sterowania i automatyki Astraada One na AGH w Krakowie
Nowoczesna produkcja wsadowa w zakładach chemicznych Stepan

Firma ASTOR od 30 lat wspiera podnoszenie efektywności procesów w przemyśle, produkcji oraz infrastrukturze dostarczając komponenty automatyki przemysłowej, robotyki, systemy IT oraz wiedzę biznesową i techniczną. Kierunek wspierania rozwoju i transformacji naszych Klientów wyznacza Przemysł 4.0. W naszym portfolio znajdują się systemy sterowania Emerson Industrial Automation&Control (dawniej GE Intelligent Platforms, GE Fanuc), Horner APG oraz Astraada One, oprogramowanie przemysłowe AVEVA (dawniej Wonderware), roboty przemysłowe Kawasaki i Epson, produkty do bezprzewodowej transmisji danych SATEL Oy i Astraada, a także falowniki, panele HMI i urządzenia sieciowe Astraada. Oferujemy usługi doradcze w ramach ASTOR Consulting i szkolenia w ramach Akademii ASTOR.

 Roboty do szkół
Roboty do szkół




 12 428 63 00
12 428 63 00


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}