
Roboty Kawasaki Robotics serii RS to linia robotów przemysłowych o małych i średnich udźwigach. Dzięki zastosowaniu najnowszych materiałów i bardzo dobrze dopracowanej konstrukcji, są one lekkie i szybkie, a 17-bitowe enkodery zapewniają jeszcze większą dokładność. Są to roboty przemysłowe o wysokiej prędkości działania. Charakteryzują się dużą dynamiką ruchu, udźwigiem od 3 do 80 kg, zasięgiem od 620 do 2100 mm.
Kawasaki Robotics RS to linia robotów przemysłowych o małych i średnich udźwigach. Dzięki zastosowaniu najnowszych materiałów i bardzo dobrze dopracowanej konstrukcji, są one lekkie i szybkie, a 17-bitowe enkodery zapewniają jeszcze większą dokładność.
Są to roboty przemysłowe o wysokiej prędkości działania. Charakteryzują się dużą dynamiką ruchu, udźwigiem od 3 do 80kg, zasięgiem od 620 do 2100 mm.
Lekkie ramię wraz z wysokoobrotowymi silnikami o dużej mocy zapewniają wiodące w branży przyspieszenie i wysoką prędkość pracy, a smukła konstrukcja nie zajmuje dużej przestrzeni podłoża.
Seria Kawasaki Robotics RS posiada wbudowane przewody pneumatyczne i wewnętrzne okablowanie dla czujników oraz zaworów elektromagnetycznych. Ponadto, możliwy jest montaż dodatkowego okablowania, rurek lub wyposażenia, gdzie dostarczane są podkładki montażowe i krany.
Roboty Kawasaki Robotics serii R mogą być programowane na dwa sposoby, za pomocą komputera oraz przy użyciu jednej z dwóch metod programowania Kawasaki - Block Step lub AS Language.

Kontroler Kawasaki Robotics F60 dostarczany jest w dwóch wariantach IP20 i IP54, które charakteryzują się kompaktową obudową i niską wagą. Obsługuje roboty Kawasaki Robotics serii RS, RA, BA, MC, MS.

Kontroler E0x Kawasaki Robotics charakteryzują się niską wagą i posiada umiejętność ograniczania strat energii elektrycznej. Model E01, E02 i E04 dedykowane są dla serii robotów BA, BX, BT, CX, MX, RA, RS, ZX, natomiast E03 są obsługiwane przez roboty paletyzujące CP i RD.
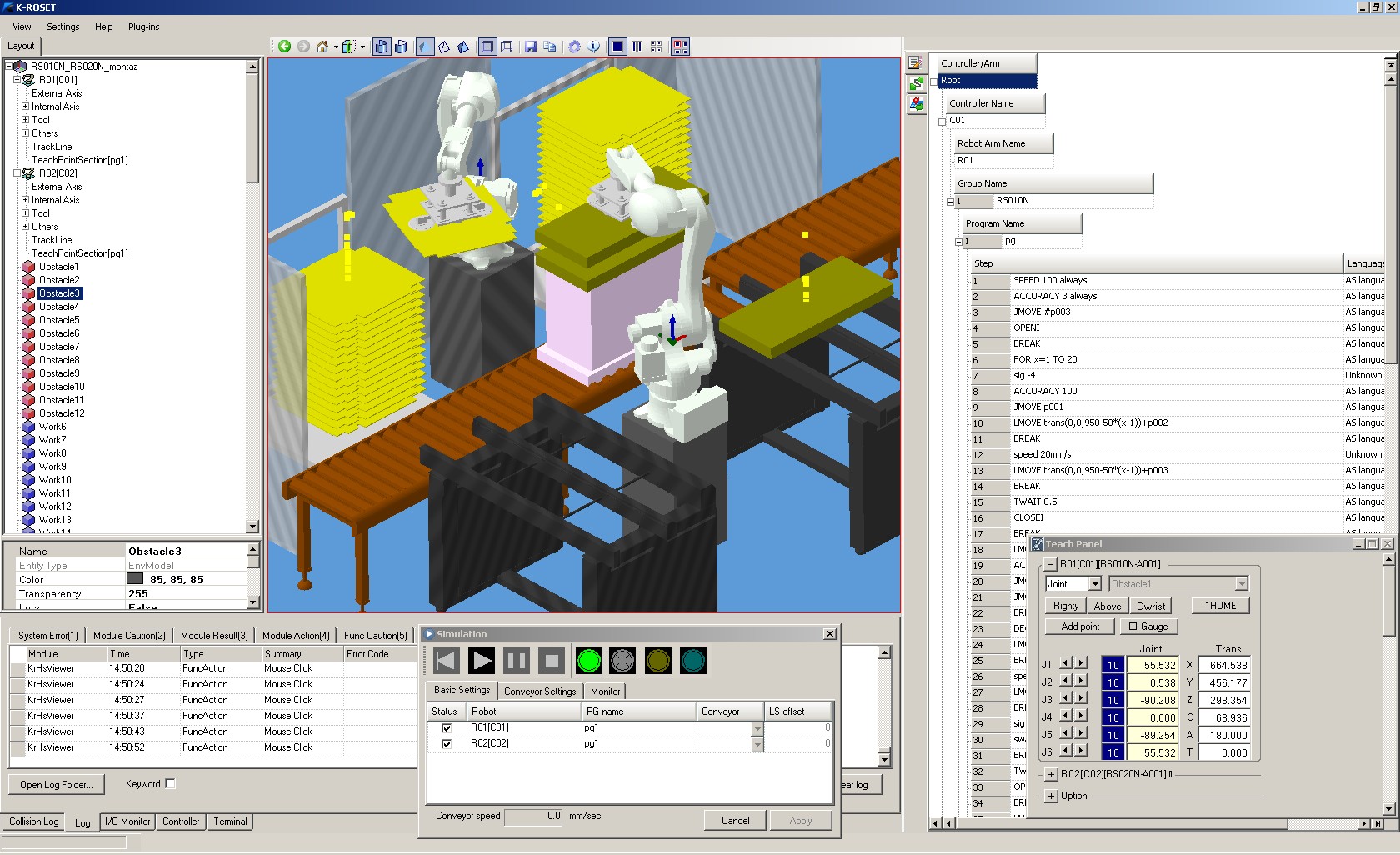
K-Roset to symulator zrobotyzowanych stanowisk pracy z robotami Kawasaki Robotics. W prosty i przejrzysty sposób pozwala na stworzenie symulacji, wykorzystując roboty z oferty Kawasaki Robotics.
Program umożliwiający zaawansowaną pracę z robotami kawasaki. Pozwala na realizację komunikacji terminalowej, kompleksowe tworzenie oraz modyfikowanie aplikacji. Posiada wbudowany edytor tekstowy, dzięki któremu można w wygodny sposób tworzyć programy.
CS-Configurator to program umożliwiający konfigurację funkcji bezpieczeństwa dostępnych w module Cubic-s dla robotów Kawasaki Robotics. Moduł ten odpowiada za monitorowanie ruchu robota Kawasaki Robotics – a w sytuacji, w której zostanie zarejestrowany ruch niedozwolony, robot Kawasaki Robotics zostaje zatrzymany awaryjnie.

Obsługa maszyny to zadanie, które w dużej mierze decyduje o wydajności produkcji całego zakładu. Dlatego szczególnie ważna jest tu prędkość robotów przemysłowych. Precyzja i powtarzalność robotów Kawasaki Robotics pozwala dodatkowo ograniczyć ilość braków i lepiej monitorować proces.
Czytaj więcej.
Pakowanie i paletyzacja (bądź depaletyzacja) to zadania mocno obciążające pracowników, które często stają się wąskim gardłem w zakładach produkcyjnych. Zastosowanie robotów przemysłowych Kawasaki Robotics pozwala uzyskać stałą wydajność linii pakującej/paletyzującej oraz jakość paletyzacji, a co za tym idzie - terminowość dostaw i bezpieczeństwo produktów w transporcie.
Czytaj więcej.
Spawanie zawsze było jednym z głównych zastosowań robotów przemysłowych. Zastosowanie robota pozwala zachować stałą jakość produkcji przy jednoczesnym ograniczeniu zużycia materiałów. Sprawia to, że inwestycje w zrobotyzowane spawanie zwracają się szybko.
Czytaj więcej.
Proces Pick & Place dotyczy głownie zadań przekładania lub pakowania produktów, które z przyczyn technologicznych należy pobierać pojedynczo. Produkty mają niewielką masę (do 2 kg) i są przenoszone na krótkich dystansach (do 50 cm) z bardzo dużą wydajnością.
Czytaj więcej.
W tym zastosowaniu roboty przemysłowe Kawasaki Robotics współpracują z dodatkowym wyposażeniem do przechowywania, przepompowywania oraz aplikowania substancji nakładanej. Systemy zbiorników, pomp i regulatorów stanowią integralną cześć stanowiska, którego głównym elementem jest robot Kawasaki Robotics. To robot za pomocą pistoletu (aplikatora) nanosi daną substancję na obiekt, który dodatkowo może się poruszać.
Czytaj więcej.
 |
Opis robota:Robot RS003N jest najmniejszy z całej serii R, która została wyposażona w nowe silniki z 17-bitowymi enkoderami. Dzięki temu roboty tej serii są jeszcze szybsze i precyzyjniejsze, a nowoczesny projekt ramienia zapewnia przy tym niewielkie gabarytu i małą masę. Niewielkie wymiary, bardzo duża szybkość oraz najwyższa precyzja sprawiają, że robot RS003N świetnie sprawdza się w zastosowaniach gdzie nie potrzeba dużego udźwigu natomiast ważne są niewielkie rozmiary, np: obsługa maszyn, laboratoria, inspekcja z użyciem systemów wizyjnych, edukacja itp. |
Przestrzeń robocza Pobierz obrazek w wysokiej rozdzielczości |
| RS003N | |
|---|---|
| Waga robota [kg] | 20 |
| Maksymalny udźwig [kg] | 3 |
| Maksymalny zasięg [mm] | 620 |
| Ilość stopni swobody | 6 |
| Powtarzalność [mm] | +/- 0.02 |
| Zakres ruchu [°] | |
| JT1 | +/- 160 |
| JT2 | +150~-60 |
| JT3 | +120~-150 |
| JT4 | +/- 360 |
| JT5 | +/- 135 |
| JT6 | +/- 360 |
| Prędkości [°/s] | |
| JT1 | 360 |
| JT2 | 250 |
| JT3 | 225 |
| JT4 | 540 |
| JT5 | 225 |
| JT6 | 540 |
| Montaż | |
| podłogowy | TAK |
| odwrotny | TAK |
| na ścianie | NIE |
| na półce | NIE |
| Kontroler | F60 |
 |
Opis robota:Robot RS005L robot z serii R, która została wyposażona w nowe silniki z 17-bitowymi enkoderami. Dzięki temu roboty tej serii są jeszcze szybsze i precyzyjniejsze, a nowoczesny projekt ramienia zapewnia przy tym niewielkie gabarytu i małą masę. Jednostka cechuje się świetną relacją między udźwigiem a masą ramienia, ma przy tym imponujący zasięg. |
Przestrzeń robocza Pobierz obrazek w wysokiej rozdzielczości |
| RS005L | |
|---|---|
| Waga robota [kg] | 37 |
| Maksymalny udźwig [kg] | 5 |
| Maksymalny zasięg [mm] | 903 |
| Ilość stopni swobody | 6 |
| Powtarzalność [mm] | +/- 0.03 |
| Zakres ruchu [°] | |
| JT1 | +/- 180 |
| JT2 | +135~-80 |
| JT3 | +118~-172 |
| JT4 | +/- 360 |
| JT5 | +/- 145 |
| JT6 | +/- 360 |
| Prędkości [°/s] | |
| JT1 | 300 |
| JT2 | 300 |
| JT3 | 300 |
| JT4 | 460 |
| JT5 | 460 |
| JT6 | 740 |
| Montaż | |
| podłogowy | TAK |
| odwrotny | TAK |
| na ścianie | OPCJA |
| na półce | NIE |
| Kontroler | F60 |
 |
Opis robota:Robot RS005N robot z serii R, która została wyposażona w nowe silniki z 17-bitowymi enkoderami. Dzięki temu roboty tej serii są jeszcze szybsze i precyzyjniejsze, a nowoczesny projekt ramienia zapewnia przy tym niewielkie gabarytu i małą masę. Jednostka cechuje się świetną relacją między udźwigiem a masą ramienia. |
Przestrzeń robocza Pobierz obrazek w wysokiej rozdzielczości |
| RS005N | |
|---|---|
| Waga robota [kg] | 34 |
| Maksymalny udźwig [kg] | 5 |
| Maksymalny zasięg [mm] | 705 |
| Ilość stopni swobody | 6 |
| Powtarzalność [mm] | +/- 0.02 |
| Zakres ruchu [°] | |
| JT1 | +/- 180 |
| JT2 | +135~-80 |
| JT3 | +118~-172 |
| JT4 | +/- 360 |
| JT5 | +/- 145 |
| JT6 | +/- 360 |
| Prędkości [°/s] | |
| JT1 | 360 |
| JT2 | 360 |
| JT3 | 410 |
| JT4 | 460 |
| JT5 | 460 |
| JT6 | 740 |
| Montaż | |
| podłogowy | TAK |
| odwrotny | TAK |
| na ścianie | OPCJA |
| na półce | NIE |
| Kontroler | F60 |
 |
Opis robota:Robot RS006L z serii R, która została wyposażona w nowe silniki z 17-bitowymi enkoderami. Dzięki temu roboty tej serii są jeszcze szybsze i precyzyjniejsze. Mała podstawa i smukła sylwetka czynią z tego robota idealne rozwiązanie do stosowania w celach i ciasnych przestrzeniach hal produkcyjnych. |
Przestrzeń robocza Pobierz obrazek w wysokiej rozdzielczości |
| RS006L | |
|---|---|
| Waga robota [kg] | 150 |
| Maksymalny udźwig [kg] | 6 |
| Maksymalny zasięg [mm] | 1650 |
| Ilość stopni swobody | 6 |
| Powtarzalność [mm] | +/- 0.03 |
| Zakres ruchu [°] | |
| JT1 | +/- 180 |
| JT2 | +145~-105 |
| JT3 | +150~-163 |
| JT4 | +/- 270 |
| JT5 | +/- 145 |
| JT6 | +/- 360 |
| Prędkości [°/s] | |
| JT1 | 250 |
| JT2 | 250 |
| JT3 | 215 |
| JT4 | 365 |
| JT5 | 480 |
| JT6 | 700 |
| Montaż | |
| podłogowy | TAK |
| odwrotny | TAK |
| na ścianie | OPCJA |
| na półce | NIE |
| Kontroler | F60 |
 |
Opis robota:Kawasaki RS007L należy do serii robotów o małym i średnim udźwigu. Dostarczany jest wraz z kontrolerem F60. |
Przestrzeń robocza |
| RS007L | |
|---|---|
| Waga robota [kg] | 36 |
| Maksymalny udźwig [kg] | 7 |
| Maksymalny zasięg [mm] | 930 |
| Ilość stopni swobody | 6 |
| Powtarzalność [mm] | +/- 0.03 |
| Zakres ruchu [°] | |
| JT1 | +/- 180 |
| JT2 | +/- 135 |
| JT3 | +/- 157 |
| JT4 | +/- 200 |
| JT5 | +/- 125 |
| JT6 | +/- 360 |
| Prędkości [°/s] | |
| JT1 | 370 |
| JT2 | 310 |
| JT3 | 410 |
| JT4 | 550 |
| JT5 | 550 |
| JT6 | 1000 |
| Montaż | |
| podłogowy | TAK |
| odwrotny | TAK |
| na ścianie | OPCJA |
| na półce | NIE |
| Kontroler | F60 |
 |
Opis robota:Kawasaki RS007N należy do serii robotów o małym i średnim udźwigu. Dostarczany jest wraz z kontrolerem F60. |
Przestrzeń robocza |
| RS007N | |
|---|---|
| Waga robota [kg] | 35 |
| Maksymalny udźwig [kg] | 7 |
| Maksymalny zasięg [mm] | 730 |
| Ilość stopni swobody | 6 |
| Powtarzalność [mm] | +/- 0.02 |
| Zakres ruchu [°] | |
| JT1 | +/- 180 |
| JT2 | +/- 135 |
| JT3 | +/- 155 |
| JT4 | +/- 200 |
| JT5 | +/- 125 |
| JT6 | +/- 360 |
| Prędkości [°/s] | |
| JT1 | 470 |
| JT2 | 380 |
| JT3 | 520 |
| JT4 | 550 |
| JT5 | 550 |
| JT6 | 1000 |
| Montaż | |
| podłogowy | TAK |
| odwrotny | TAK |
| na ścianie | OPCJA |
| na półce | NIE |
| Kontroler | F60 |
 |
Opis robota:Robot RS010L (wersja o powięszonym zasięgu robota RS010N) z serii R, która została wyposażona w nowe silniki z 17-bitowymi enkoderami. Dzięki temu roboty tej serii są jeszcze szybsze i precyzyjniejsze. Mała podstawa i smukła sylwetka czynią z tego robota idealne rozwiązanie do stosowania w celach i ciasnych przestrzeniach hal produkcyjnych. Występuje w dwóch wersjach z różnymi kontrolerami: |
Przestrzeń robocza Pobierz obrazek w wysokiej rozdzielczości |
| RS010L | |
|---|---|
| Waga robota [kg] | 230 |
| Maksymalny udźwig [kg] | 10 |
| Maksymalny zasięg [mm] | 1925 |
| Ilość stopni swobody | 6 |
| Powtarzalność [mm] | +/-0.05 |
| Zakres ruchu [°] | |
| JT1 | +/- 180 |
| JT2 | +155~-105 |
| JT3 | +150~-163 |
| JT4 | +/- 270 |
| JT5 | +/- 145 |
| JT6 | +/- 360 |
| Prędkości [°/s] | |
| JT1 | 190 |
| JT2 | 205 |
| JT3 | 210 |
| JT4 | 400 |
| JT5 | 360 |
| JT6 | 610 |
| Montaż | |
| podłogowy | TAK |
| odwrotny | TAK |
| na ścianie | OPCJA |
| na półce | NIE |
| Kontroler | E01 |
 |
Opis robota:Robot RS010N z serii R, która została wyposażona w nowe silniki z 17-bitowymi enkoderami. Dzięki temu roboty tej serii są jeszcze szybsze i precyzyjniejsze. Mała podstawa i smukła sylwetka czynią z tego robota idealne rozwiązanie do stosowania w celach i ciasnych przestrzeniach hal produkcyjnych. |
Przestrzeń robocza Pobierz obrazek w wysokiej rozdzielczości |
| RS010N | |
|---|---|
| Waga robota [kg] | 150 |
| Maksymalny udźwig [kg] | 10 |
| Maksymalny zasięg [mm] | 1450 |
| Ilość stopni swobody | 6 |
| Powtarzalność [mm] | +/-0.03 |
| Zakres ruchu [°] | |
| JT1 | +/- 180 |
| JT2 | +145~-105 |
| JT3 | +150~-163 |
| JT4 | +/- 270 |
| JT5 | +/- 145 |
| JT6 | +/- 360 |
| Prędkości [°/s] | |
| JT1 | 250 |
| JT2 | 250 |
| JT3 | 215 |
| JT4 | 365 |
| JT5 | 380 |
| JT6 | 700 |
| Montaż | |
| podłogowy | TAK |
| odwrotny | TAK |
| na ścianie | OPCJA |
| na półce | NIE |
| Kontroler | F60 |
 |
Opis robota:Najnowszy model z wiodącą w branży dużą prędkością i szerokim zakresem roboczym w kompaktowej obudowie. Martwa przestrzeń jest zminimalizowana poprzez zwiększenie zakresu obrotu każdej osi i maksymalnego zasięgu robota. Silniki o dużej mocy połączone ze sztywnym ramieniem konstrukcji zapewniają doskonały moment obrotowy i obciążenie nadgarstka. Dostarczany jest wraz z kontrolerem F60. |
Przestrzeń robocza |
| RS013N | |
|---|---|
| Waga robota [kg] | 170 |
| Maksymalny udźwig [kg] | 13 |
| Maksymalny zasięg [mm] | 1460 |
| Ilość stopni swobody | 6 |
| Powtarzalność [mm] | +/-0.03 |
| Zakres ruchu [°] | |
| JT1 | +/- 180 |
| JT2 | + 138 ~ - 105 |
| JT3 | +135 ~ -159 |
| JT4 | +/- 200 |
| JT5 | +/- 125 |
| JT6 | +/- 360 |
| Prędkości [°/s] | |
| JT1 | 265 |
| JT2 | 250 |
| JT3 | 265 |
| JT4 | 475 |
| JT5 | 475 |
| JT6 | 730 |
| Montaż | |
| podłogowy | TAK |
| odwrotny | TAK |
| na ścianie | NIE |
| na półce | NIE |
| Kontroler | F60 |
 |
Opis robota:Robot RS015X z serii R, która została wyposażona w nowe silniki z 17-bitowymi enkoderami. Dzięki temu roboty tej serii są jeszcze szybsze i precyzyjniejsze. Mała podstawa i smukła sylwetka czynią z tego robota idealne rozwiązanie do stosowania w celach i ciasnych przestrzeniach hal produkcyjnych. |
Przestrzeń robocza Pobierz obrazek w wysokiej rozdzielczości |
| RS015X | |
|---|---|
| Waga robota [kg] | 545 |
| Maksymalny udźwig [kg] | 15 |
| Maksymalny zasięg [mm] | 3150 |
| Ilość stopni swobody | 6 |
| Powtarzalność [mm] | +/- 0.06 |
| Zakres ruchu [°] | |
| JT1 | +/- 180 |
| JT2 | +140 ~ -105 |
| JT3 | +135 ~ -155 |
| JT4 | +/- 360 |
| JT5 | +/- 145 |
| JT6 | +/- 360 |
| Prędkości [°/s] | |
| JT1 | 180 |
| JT2 | 180 |
| JT3 | 200 |
| JT4 | 410 |
| JT5 | 360 |
| JT6 | 610 |
| Montaż | |
| podłogowy | TAK |
| odwrotny | TAK |
| na ścianie | OPCJA |
| na półce | NIE |
| Kontroler | E02 |
 |
Opis robota:Robot RS20N z kontrolerem E01 to pierwszy przedstawiciel nowej rodziny robotów Kawasaki – serii R. |
Przestrzeń robocza Pobierz obrazek w wysokiej rozdzielczości |
| RS020N | |
|---|---|
| Waga robota [kg] | 230 |
| Maksymalny udźwig [kg] | 20 |
| Maksymalny zasięg [mm] | 1725 |
| Ilość stopni swobody | 6 |
| Powtarzalność [mm] | +/-0.04 |
| Zakres ruchu [°] | |
| JT1 | +/- 180 |
| JT2 | +155~-105 |
| JT3 | +150~-163 |
| JT4 | +/- 270 |
| JT5 | +/- 145 |
| JT6 | +/- 360 |
| Prędkości [°/s] | |
| JT1 | 190 |
| JT2 | 205 |
| JT3 | 210 |
| JT4 | 400 |
| JT5 | 360 |
| JT6 | 610 |
| Montaż | |
| podłogowy | TAK |
| odwrotny | TAK |
| na ścianie | OPCJA |
| na półce | NIE |
| Kontroler | E01 |
 |
Opis robota:Robot RS030N z serii R, która została wyposażona w nowe silniki z 17-bitowymi enkoderami. Dzięki temu roboty tej serii są jeszcze szybsze i precyzyjniejsze. Mała podstawa i smukła sylwetka czynią z tego robota idealne rozwiązanie do stosowania w celach i ciasnych przestrzeniach hal produkcyjnych. |
Przestrzeń robocza Pobierz obrazek w wysokiej rozdzielczości |
| RS030N | |
|---|---|
| Waga robota [kg] | 555 |
| Maksymalny udźwig [kg] | 30 |
| Maksymalny zasięg [mm] | 2100 |
| Ilość stopni swobody | 6 |
| Powtarzalność [mm] | +/-0.06 |
| Zakres ruchu [°] | |
| JT1 | +/- 180 |
| JT2 | +140~-105 |
| JT3 | +135~-155 |
| JT4 | +/- 360 |
| JT5 | +/- 145 |
| JT6 | +/- 360 |
| Prędkości [°/s] | |
| JT1 | 180 |
| JT2 | 180 |
| JT3 | 185 |
| JT4 | 260 |
| JT5 | 260 |
| JT6 | 360 |
| Montaż | |
| podłogowy | TAK |
| odwrotny | TAK |
| na ścianie | OPCJA |
| na półce | NIE |
| Kontroler | E02 |
 |
Opis robota:Robot RS050N z serii R, która została wyposażona w nowe silniki z 17-bitowymi enkoderami. Dzięki temu roboty tej serii są jeszcze szybsze i precyzyjniejsze. Mała podstawa i smukła sylwetka czynią z tego robota idealne rozwiązanie do stosowania w celach i ciasnych przestrzeniach hal produkcyjnych. |
Przestrzeń robocza Pobierz obrazek w wysokiej rozdzielczości |
| RS050N | |
|---|---|
| Waga robota [kg] | 555 |
| Maksymalny udźwig [kg] | 50 |
| Maksymalny zasięg [mm] | 2100 |
| Ilość stopni swobody | 6 |
| Powtarzalność [mm] | +/-0.06 |
| Zakres ruchu [°] | |
| JT1 | +/- 180 |
| JT2 | +140~-105 |
| JT3 | +135~-155 |
| JT4 | +/- 360 |
| JT5 | +/- 145 |
| JT6 | +/- 360 |
| Prędkości [°/s] | |
| JT1 | 180 |
| JT2 | 180 |
| JT3 | 185 |
| JT4 | 260 |
| JT5 | 260 |
| JT6 | 360 |
| Montaż | |
| podłogowy | TAK |
| odwrotny | TAK |
| na ścianie | OPCJA |
| na półce | NIE |
| Kontroler | E02 |
 |
Opis robota:Robot RS080N to największa jednostka z serii R, która została wyposażona w nowe silniki z 17-bitowymi enkoderami. Dzięki temu roboty tej serii są jeszcze szybsze i precyzyjniejsze. Mała podstawa i smukła sylwetka czynią z tego robota idealne rozwiązanie do stosowania w celach i ciasnych przestrzeniach hal produkcyjnych, a udźwig 80 kg umożliwia przenoszenie ciężkich przedmiotów. |
Przestrzeń robocza Pobierz obrazek w wysokiej rozdzielczości |
| RS080N | |
|---|---|
| Waga robota [kg] | 555 |
| Maksymalny udźwig [kg] | 80 |
| Maksymalny zasięg [mm] | 2100 |
| Ilość stopni swobody | 6 |
| Powtarzalność [mm] | +/-0.06 |
| Zakres ruchu [°] | |
| JT1 | +/- 180 |
| JT2 | +140~-105 |
| JT3 | +135~-155 |
| JT4 | +/- 360 |
| JT5 | +/- 145 |
| JT6 | +/- 360 |
| Prędkości [°/s] | |
| JT1 | 180 |
| JT2 | 180 |
| JT3 | 160 |
| JT4 | 185 |
| JT5 | 165 |
| JT6 | 280 |
| Montaż | |
| podłogowy | TAK |
| odwrotny | TAK |
| na ścianie | OPCJA |
| na półce | NIE |
| Kontroler | E02 |

Zostaw wiadomość lub zadaj pytanie – odpowiemy niezwłocznie.


Napisz do nas - odpowiemy w ciągu 24h
Potrzebujesz pomocy? Skontaktuj się z nami. Odpowiemy na wszystkie Twoje pytania.
Szkolenie z obsługi i programowania robotów Kawasaki cz.1 dla Użytkowników
Szkolenie z zaawansowanych metod programowania robotów Kawasaki
Szkolenie z uruchomienia, obsługi i programowania robotów Astorino dla Użytkowników
WIŚNIOWSKI - cyfrowa indywidualizacja w fabryce przyszłości
Uniwersytet Zielonogórski - edukacyjna zrobotyzowana linia produkcyjna
ZST Leżajsk - nowoczesna pracownia dla młodych robotyków

Firma ASTOR od 30 lat wspiera podnoszenie efektywności procesów w przemyśle, produkcji oraz infrastrukturze dostarczając komponenty automatyki przemysłowej, robotyki, systemy IT oraz wiedzę biznesową i techniczną. Kierunek wspierania rozwoju i transformacji naszych Klientów wyznacza Przemysł 4.0. W naszym portfolio znajdują się systemy sterowania Emerson Industrial Automation&Control (dawniej GE Intelligent Platforms, GE Fanuc), Horner APG oraz Astraada One, oprogramowanie przemysłowe AVEVA (dawniej Wonderware), roboty przemysłowe Kawasaki i Epson, produkty do bezprzewodowej transmisji danych SATEL Oy i Astraada, a także falowniki, panele HMI i urządzenia sieciowe Astraada. Oferujemy usługi doradcze w ramach ASTOR Consulting i szkolenia w ramach Akademii ASTOR.

 Roboty do szkół
Roboty do szkół




 12 428 63 00
12 428 63 00


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}