
Roboty Kawasaki Robotics serii Z to jednostki o dużych udźwigach do zastosowań w paletyzacji, przenoszeniu oraz manipulowaniu zarówno obiektem, jak i narzędziem (np. zgrzewadło, serwochwytak, głowica szlifierska, frezarka). Udźwigi: 100 - 300kg, zasięgi: 1355 - 3530mm.
Roboty Kawasaki Robotics serii Z to jednostki o dużych udźwigach, przeznaczone do zastosowań w paletyzacji, przenoszeniu oraz manipulowaniu zarówno obiektem, jak i narzędziem (np. zgrzewadło, serwochwytak, głowica szlifierska, frezarka). Udźwigi wynoszą od 100 do 300kg, natomiast zasięgi od 1355 do 3530mm.
Roboty Kawasaki Robotics poruszają się bardzo szybko i posiadają zaawansowane technologie sterowania ruchem, co prowadzi do znacznego skrócenia czasu cyklu i maksymalizowania wydajności produkcji. Szeroki zakres prac i większą elastyczność zapewnia im ramię z dużym zasięgiem oraz minimalna martwa strefa.
Roboty Kawasaki Robotics cechują się ponadto niezawodnością i niskim okresem konserwacji wynoszącym 10.000 godzin, co w konsekwencji oznacza niskie koszty operacyjne i maksymalną wydajność produkcji.

Kontroler Kawasaki Robotics E0x
Kontroler E0X Kawasaki Robotics charakteryzują się niską wagą i posiada umiejętność ograniczania strat energii elektrycznej. Model E01, E02 i E04 dedykowane są dla serii robotów BA, BX, BT, CX, MX, RA, RS, ZX, natomiast E03 są obsługiwane przez roboty paletyzujące CP i RD.
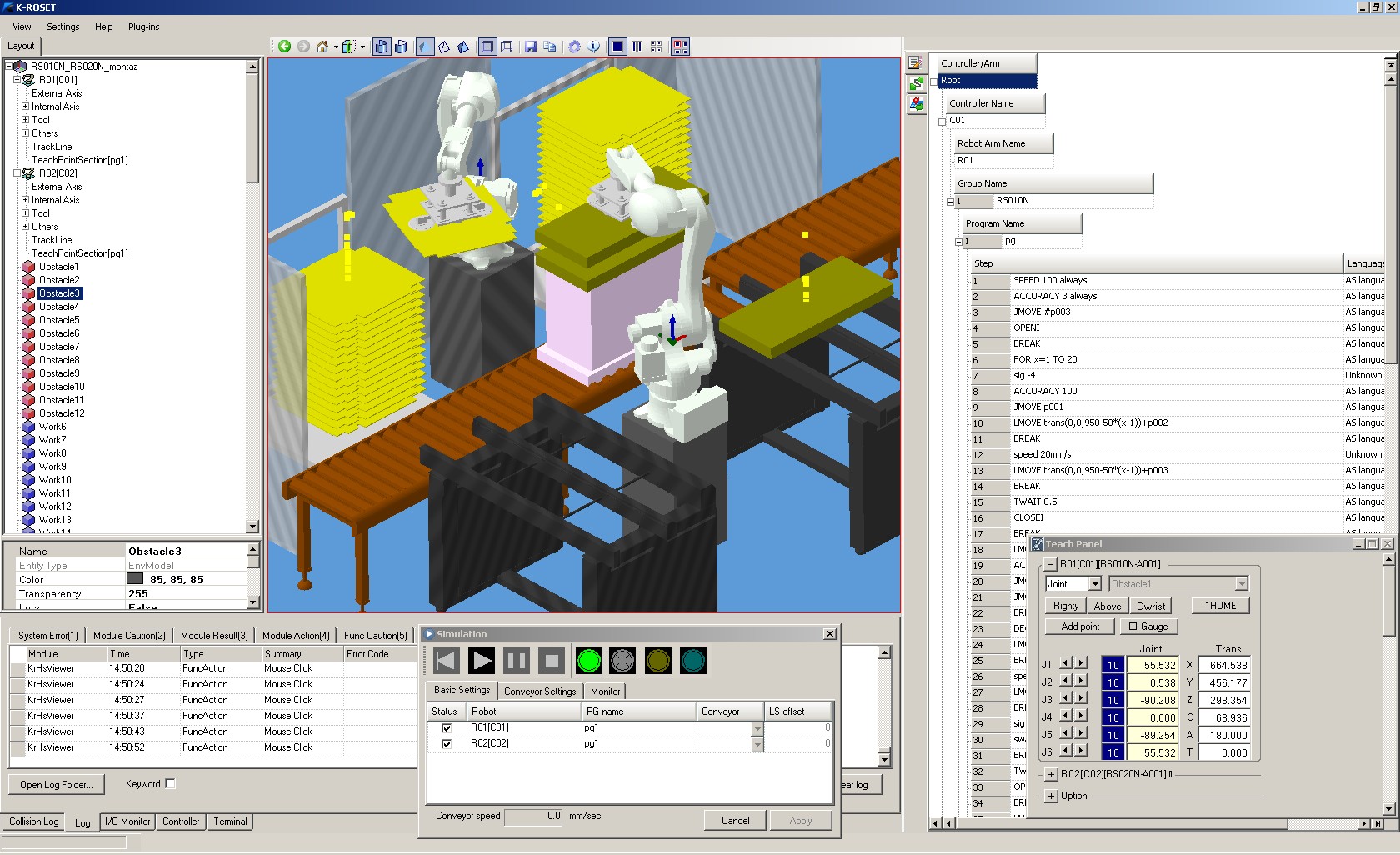
K-Roset to symulator zrobotyzowanych stanowisk pracy z robotami Kawasaki Robotics. W prosty i przejrzysty sposób pozwala na stworzenie symulacji, wykorzystując roboty z oferty Kawasaki Robotics.
Program umożliwiający zaawansowaną pracę z robotami Kawasaki Robotics. Pozwala na realizację komunikacji terminalowej, kompleksowe tworzenie oraz modyfikowanie aplikacji. Posiada wbudowany edytor tekstowy, dzięki któremu można w wygodny sposób tworzyć programy.
CS-Configurator to program umożliwiający konfigurację funkcji bezpieczeństwa dostępnych w module Cubic-s dla robotów Kawasaki Robotics. Moduł ten odpowiada za monitorowanie ruchu robota Kawasaki Robotics – a w sytuacji, w której zostanie zarejestrowany ruch niedozwolony, robot zostaje zatrzymany awaryjnie.

Obsługa maszyny to zadanie, które w dużej mierze decyduje o wydajności produkcji całego zakładu. Dlatego szczególnie ważna jest tu prędkość robotów przemysłowych Kawasaki Robotics. Ich precyzja i powtarzalność pozwala dodatkowo ograniczyć ilość braków i lepiej monitorować proces.
Czytaj więcej.
Pakowanie i paletyzacja (bądź depaletyzacja) to zadania mocno obciążające pracowników, które często stają się wąskim gardłem w zakładach produkcyjnych. Zastosowanie robotów przemysłowych Kawasaki Robotics pozwala uzyskać stałą wydajność linii pakującej/paletyzującej oraz jakość paletyzacji, a co za tym idzie - terminowość dostaw i bezpieczeństwo produktów w transporcie.
Czytaj więcej.
Spawanie zawsze było jednym z głównych zastosowań robotów przemysłowych. Zastosowanie robota Kawasaki Robotics pozwala zachować stałą jakość produkcji przy jednoczesnym ograniczeniu zużycia materiałów. Sprawia to, że inwestycje w zrobotyzowane spawanie zwracają się szybko.
Czytaj więcej.
W tym zastosowaniu roboty przemysłowe Kawasaki Robotics współpracują z dodatkowym wyposażeniem do przechowywania, przepompowywania oraz aplikowania substancji nakładanej. Systemy zbiorników, pomp i regulatorów stanowią integralną część stanowiska, którego głównym elementem jest robot. To robot Kawasaki Robotics za pomocą pistoletu (aplikatora) nanosi daną substancję na obiekt, który dodatkowo może się poruszać.
Czytaj więcej.Roboty Kawasaki Robotics serii ZX to 6-osiowe roboty przemysłowe o dużych udźwigach. Świetnie sprawdzają się w zadaniach wymagających manipulacji ciężkimi przedmiotami.
Kawasaki Robotics ZX130L - udźwig 130 kg, zasięg 2951 mm
 |
Opis robota:Roboty o udźwigu od 130 do 300 kg występują w kilku odmianach zasięgowych, pozwalając precyzyjnie dobrać robota do potrzeb użytkonika. Dzięki zastosowaniu specjalnej konstrukcji kinematycznej są bardzo szybkie i dokładne. |
Przestrzeń robocza Pobierz obrazek w wysokiej rozdzielczości |
| ZX130L | |
|---|---|
| Waga robota [kg] | 1400 |
| Maksymalny udźwig [kg] | 130 |
| Maksymalny zasięg [mm] | 2951 |
| Ilość stopni swobody | 6 |
| Powtarzalność [mm] | +/-0.3 |
| Zakres ruchu [°] | |
| JT1 | +/- 180 |
| JT2 | +75~-60 |
| JT3 | +250~-120 |
| JT4 | +/- 360 |
| JT5 | +/- 130 |
| JT6 | +/- 360 |
| Prędkości [°/s] | |
| JT1 | 110 |
| JT2 | 110 |
| JT3 | 110 |
| JT4 | 140 |
| JT5 | 135 |
| JT6 | 230 |
| Montaż | |
| podłogowy | TAK |
| odwrotny | NIE |
| na ścianie | NIE |
| na półce | NIE |
| Kontroler | E02 |
 |
Opis robota:Roboty o udźwigu od 130 do 300 kg występują w kilku odmianach zasięgowych, pozwalając precyzyjnie dobrać robota do potrzeb użytkonika. Dzięki zastosowaniu specjalnej konstrukcji kinematycznej są bardzo szybkie i dokładne. |
Przestrzeń robocza Pobierz obrazek w wysokiej rozdzielczości |
| ZX130U | |
|---|---|
| Waga robota [kg] | 1350 |
| Maksymalny udźwig [kg] | 130 |
| Maksymalny zasięg [mm] | 2651 |
| Ilość stopni swobody | 6 |
| Powtarzalność [mm] | +/-0.3 |
| Zakres ruchu [°] | |
| JT1 | +/- 180 |
| JT2 | +75~-60 |
| JT3 | +250~-120 |
| JT4 | +/- 360 |
| JT5 | +/- 130 |
| JT6 | +/- 360 |
| Prędkości [°/s] | |
| JT1 | 110 |
| JT2 | 110 |
| JT3 | 110 |
| JT4 | 140 |
| JT5 | 135 |
| JT6 | 230 |
| Montaż | |
| podłogowy | TAK |
| odwrotny | NIE |
| na ścianie | NIE |
| na półce | TAK |
| Kontroler | E02 |
 |
Opis robota:Roboty o udźwigu od 130 do 300 kg występują w kilku odmianach zasięgowych, pozwalając precyzyjnie dobrać robota do potrzeb użytkonika. Dzięki zastosowaniu specjalnej konstrukcji kinematycznej są bardzo szybkie i dokładne. |
Przestrzeń robocza Pobierz obrazek w wysokiej rozdzielczości |
| ZX165U | |
|---|---|
| Waga robota [kg] | 1350 |
| Maksymalny udźwig [kg] | 165 |
| Maksymalny zasięg [mm] | 2651 |
| Ilość stopni swobody | 6 |
| Powtarzalność [mm] | +/-0.3 |
| Zakres ruchu [°] | |
| JT1 | +/- 180 |
| JT2 | +75~-60 |
| JT3 | +250~-120 |
| JT4 | +/- 360 |
| JT5 | +/- 130 |
| JT6 | +/- 360 |
| Prędkości [°/s] | |
| JT1 | 110 |
| JT2 | 110 |
| JT3 | 115 |
| JT4 | 140 |
| JT5 | 155 |
| JT6 | 260 |
| Montaż | |
| podłogowy | TAK |
| odwrotny | NIE |
| na ścianie | NIE |
| na półce | NIE |
| Kontroler | E02 |
 |
Opis robota:Robot o udźwigu od 130 do 300 kg występują w kilku odmianach zasięgowych, pozwalając precyzyjnie dobrać robota do potrzeb użytkonika. Dzięki zastosowaniu specjalnej konstrukcji kinematycznej są bardzo szybkie i dokładne. |
Przestrzeń robocza Pobierz obrazek w wysokiej rozdzielczości |
| ZX200S | |
|---|---|
| Waga robota [kg] | 1400 |
| Maksymalny udźwig [kg] | 200 |
| Maksymalny zasięg [mm] | 2651 |
| Ilość stopni swobody | 6 |
| Powtarzalność [mm] | +/-0.3 |
| Zakres ruchu [°] | |
| JT1 | +/- 180 |
| JT2 | +75~-60 |
| JT3 | +250~-120 |
| JT4 | +/- 360 |
| JT5 | +/-130 |
| JT6 | +/-360 |
| Prędkości [°/s] | |
| JT1 | 105 |
| JT2 | 110 |
| JT3 | 105 |
| JT4 | 120 |
| JT5 | 120 |
| JT6 | 200 |
| Montaż | |
| podłogowy | TAK |
| odwrotny | NIE |
| na ścianie | NIE |
| na półce | NIE |
| Kontroler | E02 |
 |
Opis robota:Roboty o udźwigu od 130 do 300 kg występują w kilku odmianach zasięgowych, pozwalając precyzyjnie dobrać robota do potrzeb użytkonika. Dzięki zastosowaniu specjalnej konstrukcji kinematycznej są bardzo szybkie i dokładne. |
Przestrzeń robocza Pobierz obrazek w wysokiej rozdzielczości |
| ZX300S | |
|---|---|
| Waga robota [kg] | 1400 |
| Maksymalny udźwig [kg] | 300 |
| Maksymalny zasięg [mm] | 2501 |
| Ilość stopni swobody | 6 |
| Powtarzalność [mm] | +/-0.3 |
| Zakres ruchu [°] | |
| JT1 | +/- 180 |
| JT2 | +75~-60 |
| JT3 | +250~-120 |
| JT4 | +/- 360 |
| JT5 | +/- 130 |
| JT6 | +/- 360 |
| Prędkości [°/s] | |
| JT1 | 100 |
| JT2 | 85 |
| JT3 | 85 |
| JT4 | 90 |
| JT5 | 90 |
| JT6 | 150 |
| Montaż | |
| podłogowy | TAK |
| odwrotny | NIE |
| na ścianie | NIE |
| na półce | NIE |
| Kontroler | E02 |

Zostaw wiadomość lub zadaj pytanie – odpowiemy niezwłocznie.


Napisz do nas - odpowiemy w ciągu 24h
Potrzebujesz pomocy? Skontaktuj się z nami. Odpowiemy na wszystkie Twoje pytania.
Szkolenie z zaawansowanych metod programowania robotów Kawasaki
Szkolenie z obsługi i programowania robotów Kawasaki cz.1 dla Użytkowników
Szkolenie z uruchomienia, obsługi i programowania robotów Astorino dla Użytkowników
Siniat w Koninie - zrobotyzowana paletyzacja materiałów budowlanych
POLMO - zautomatyzowana produkcja i robotyzacja spawania
FROST - robot przemysłowy Kawasaki w paletyzacji cebuli

Firma ASTOR od 30 lat wspiera podnoszenie efektywności procesów w przemyśle, produkcji oraz infrastrukturze dostarczając komponenty automatyki przemysłowej, robotyki, systemy IT oraz wiedzę biznesową i techniczną. Kierunek wspierania rozwoju i transformacji naszych Klientów wyznacza Przemysł 4.0. W naszym portfolio znajdują się systemy sterowania Emerson Industrial Automation&Control (dawniej GE Intelligent Platforms, GE Fanuc), Horner APG oraz Astraada One, oprogramowanie przemysłowe AVEVA (dawniej Wonderware), roboty przemysłowe Kawasaki i Epson, produkty do bezprzewodowej transmisji danych SATEL Oy i Astraada, a także falowniki, panele HMI i urządzenia sieciowe Astraada. Oferujemy usługi doradcze w ramach ASTOR Consulting i szkolenia w ramach Akademii ASTOR.

 Roboty do szkół
Roboty do szkół




 12 428 63 00
12 428 63 00


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}