
Czas trwania kursu: 2 dni
Godziny trwania kursu: 9:00-16:00

Szkolenie jest przeznaczone dla integratorów oraz użytkowników końcowych, którzy ukończyli podstawowe szkolenia ze ścieżki Kawasaki.
Przebieg szkolenia i realizacja poszczególnych zagadnień uzależnione są od ilości uczestników i tempa wykonywania zadań przez grupę.
Przebieg szkolenia i realizacja poszczególnych zagadnień uzależnione są od ilości uczestników i tempa wykonywania zadań przez grupę.

działania środowiska symulacyjnego K-Roset oraz KIDE,
tworzenia dodatkowych elementów 3d stanowiska zrobotyzowanego w symulacji (np. paleta, postument, chwytak, detale, itd.),
obsługi wirtualnego robota w symulacji,
obsługi wirtualnego chwytaka w symulacji,
weryfikacji zasięgu pracy robota wirtualnego w symulacji,
pisania podstawowej wersji programu ruchu dla robota wirtualnego w symulacji,
Formularz zgłoszenia jest prawnie wiążąca umową zawartą pomiędzy Organizatorem szkolenia a Zgłaszającym

Warunkiem wpisania na listę uczestników szkolenia jest przesłanie zgłoszenia wraz z kopią potwierdzenia wpłaty najpóźniej 7 dni przed rozpoczęciem szkolenia
W przypadku rezygnacji w terminie krótszym niż 7 dni przed rozpoczęciem szkolenia wpłacona kwota nie podlega zwrotowi
Jeśli liczba uczestników kursu nie osiągnie wymaganego minimum, firma ASTOR zastrzega sobie możliwość przeniesienia na inny termin

Obowiązkowe ukończenie kursu: „Obsługa i programowanie robotów Kawasaki cz. 1 – kurs dla Użytkowników” lub „Obsługa i programowanie robotów Kawasaki – kurs dla Integratorów”.
Podstawowa znajomość zagadnień związanych z automatyką i robotyką

Kurs Ethernet IP w robotach Kawasaki
Z kursu dowiesz się, czym jest protokół Software Ethernet IP, gdzie jest używany, i jak skonfigurować połączenie między urządzeniami, na przykładzie robota Kawasaki i różnych sterowników PLC.
2021-04-08 | Mateusz Fas
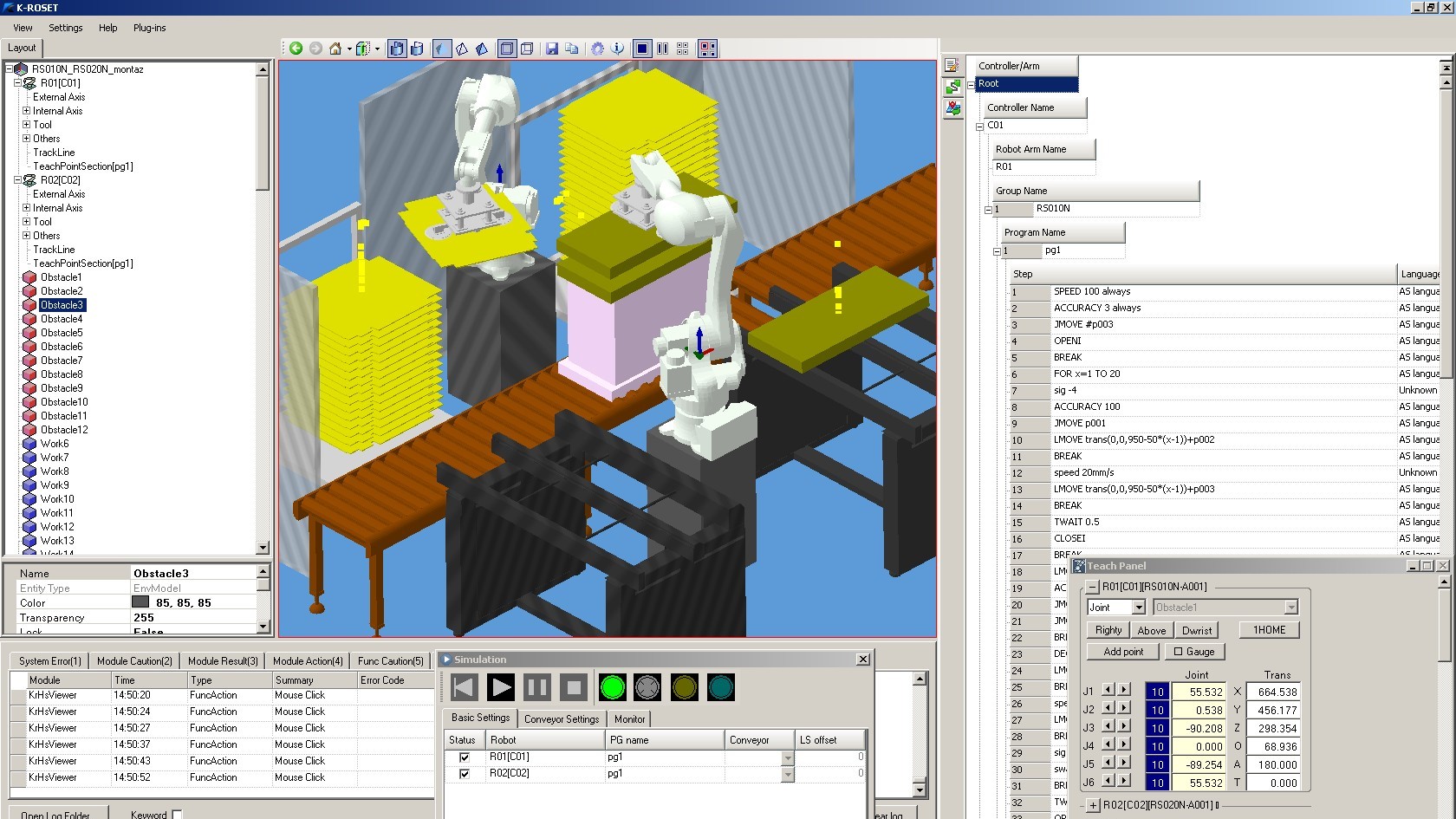
E-szkolenie - Projektowanie i symulacja zrobotyzowanych stanowisk pracy w oprogramowaniu K-Roset
Szkolenie prezentuje podstawowe możliwości oprogramowania k-roset, które jest środowiskiem umożliwiającym symulowanie pracy robotów kawasaki.
2024-04-05 | ASTOR
Jak wyglądają szkolenia z robotów przemysłowych Kawasaki i EPSON w ASTOR?
W Centrum Szkoleniowym w Krakowie każdy uczestnik ma do dyspozycji stanowisko szkoleniowe, w tym komputer i robota. Kursy prowadzą inżynierowie-praktycy z dużym doświadczeniem dydaktycznym.
2021-08-18 | ASTOR

 Roboty do szkół
Roboty do szkół
 12 428 63 00
12 428 63 00

