
Czas trwania kursu: 2 dni (z możliwością rozszerzenia do 3 dni)
Godziny trwania kursu: 9:00-16:00

Szkolenie jest dedykowane dla Integratorów zajmujących się wdrażaniem robotów przemysłowych Kawasaki Robotics, którzy ukończyli szkolenie „Obsługa i programowanie robotów Kawasaki Robotics – kurs dla Integratorów” oraz dla Użytkowników robotów przemysłowych Kawasaki Robotics, którzy ukończyli szkolenie „Obsługa i programowanie robotów Kawasaki Robotics cz. 2 – kurs dla Użytkowników”.
Przebieg szkolenia i realizacja poszczególnych zagadnień uzależnione są od ilości
uczestników i tempa wykonywania zadań przez grupę.
Możliwość rozszerzenia do 3 dni - zagadnienia poruszane na szkoleniu ustalane są indywidualnie z klientem, obowiązuje indywidualna wycena.
Przebieg szkolenia i realizacja poszczególnych zagadnień uzależnione są od ilości uczestników i tempa wykonywania zadań przez grupę.

programowania dynamicznych układów lokalnych
zaawansowanej obsługi podprogramów oraz przerwań
zaawansowanej obsługi programów równoległych PC, zaawansowanej obsługi Interface panelu
połączenia oprogramowania K-Roset i KIDE oraz wykorzystania ich do analizowania trajektorii ruchu robota oraz wydajności aplikacji
optymalizowania trajektorii ruchu oraz zwiększania wydajności aplikacji
budowania algorytmów dynamicznej zmiany trajektorii ruchu robota
Formularz zgłoszenia jest prawnie wiążącą umową zawartą pomiędzy Organizatorem szkolenia a Zgłaszającym

Warunkiem wpisania na listę uczestników szkolenia jest przesłanie zgłoszenia wraz z kopią potwierdzenia wpłaty najpóźniej 7 dni przed rozpoczęciem szkolenia
W przypadku rezygnacji w terminie krótszym niż 7 dni przed rozpoczęciem szkolenia wpłacona kwota nie podlega zwrotowi
Jeśli liczba uczestników kursu nie osiągnie wymaganego minimum, firma ASTOR zastrzega sobie możliwość przeniesienia na inny termin
Znajomość zagadnień związanych z automatyką i robotyką
Wymagane przejście szkoleń Obsługa i programowanie robotów Kawasaki cz.1 - kurs dla Użytkowników i Obsługa i programowanie robotów Kawasaki cz.2 - kurs dla Użytkowników bądź przejście szkolenia Obsługa i programowanie robotów Kawasaki - kurs dla Integratorów
Wymagana wiedza na temat języka programowania tekstowego AS Language

Podstawowa umiejętność obsługi komputera z systemem Windows

Kurs Ethernet IP w robotach Kawasaki
Z kursu dowiesz się, czym jest protokół Software Ethernet IP, gdzie jest używany, i jak skonfigurować połączenie między urządzeniami, na przykładzie robota Kawasaki i różnych sterowników PLC.
2021-04-08 | Mateusz Fas
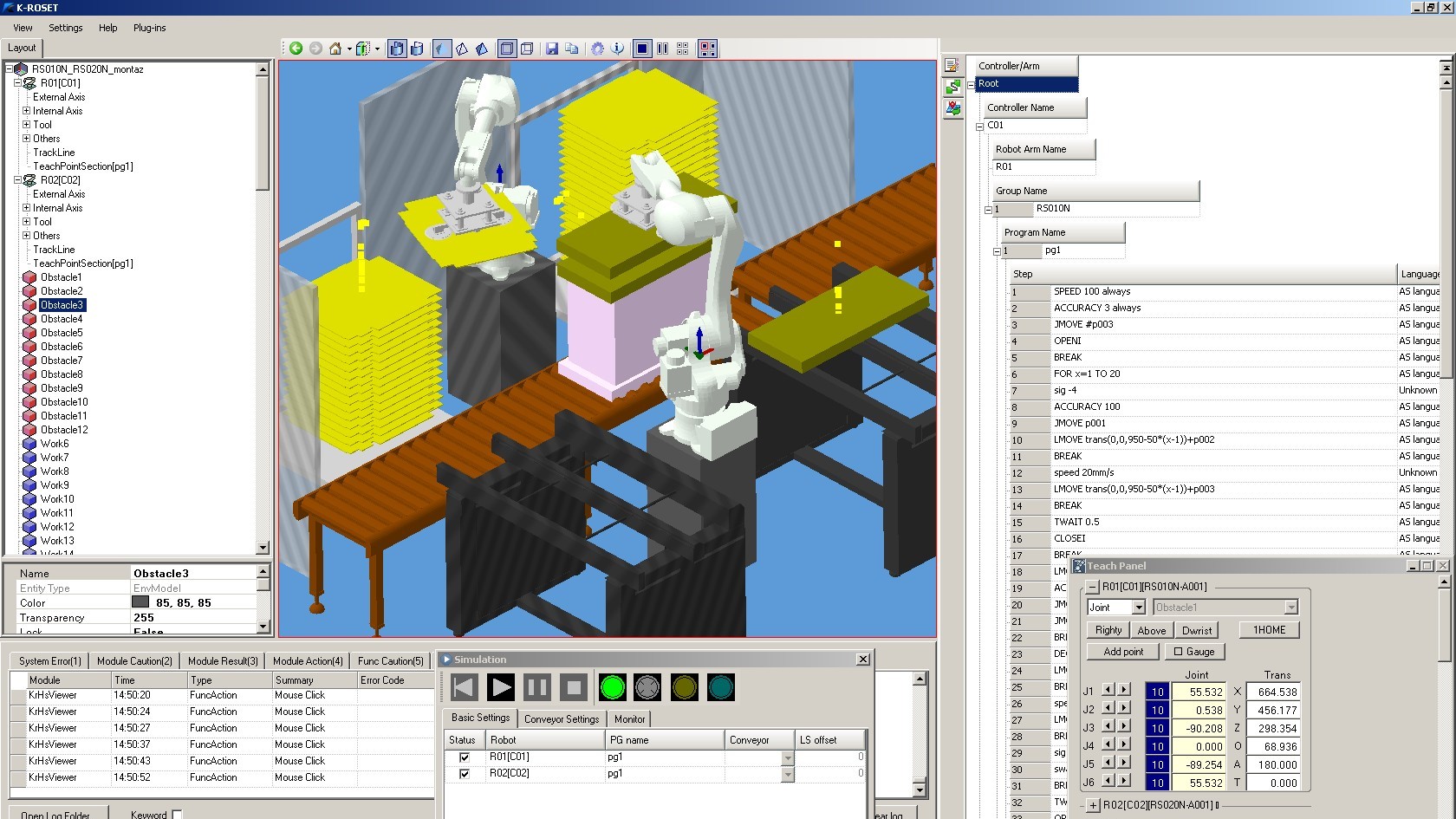
E-szkolenie - Projektowanie i symulacja zrobotyzowanych stanowisk pracy w oprogramowaniu K-Roset
Szkolenie prezentuje podstawowe możliwości oprogramowania k-roset, które jest środowiskiem umożliwiającym symulowanie pracy robotów kawasaki.
2024-04-05 | ASTOR
Jak wyglądają szkolenia z robotów przemysłowych Kawasaki i EPSON w ASTOR?
W Centrum Szkoleniowym w Krakowie każdy uczestnik ma do dyspozycji stanowisko szkoleniowe, w tym komputer i robota. Kursy prowadzą inżynierowie-praktycy z dużym doświadczeniem dydaktycznym.
2021-08-18 | ASTOR

 Roboty do szkół
Roboty do szkół

 12 428 63 00
12 428 63 00

