
Strona główna ASTOR
Roboty Kawasaki
39 postów
Bez kategorii
Cubic-S – jak działa i do czego służy opcjonalny moduł bezpieczeństwa w robotach Kawasaki Robotics?
Moduł Cubic-S w robotach Kawasaki Robotics jest odpowiedzialny za zapewnienie bezpieczeństwa poprzez… 2021-12-30 Klaudia Rzeszowska
Cubic-S – jak działa i do czego służy opcjonalny moduł bezpieczeństwa w robotach Kawasaki Robotics?
Moduł Cubic-S w robotach Kawasaki Robotics jest odpowiedzialny za zapewnienie…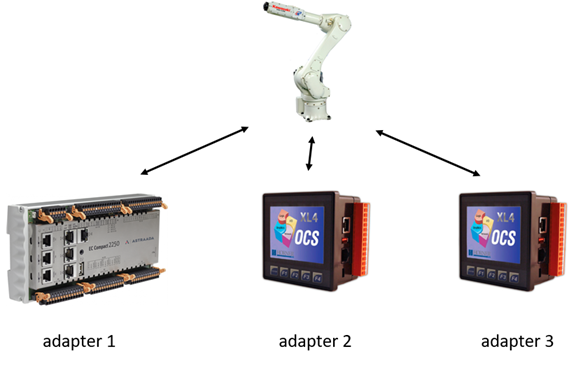
Bez kategorii
Konfiguracja więcej niż jednego urządzenia typu adapter w komunikacji z robotem Kawasaki – skanerem – w protokole Ethernet/IP – odc.7
W tym odcinku dowiesz się jak skonfigurować komunikację więcej niż jednego urządzenia… 2021-05-28 Tomasz Fuchs
Konfiguracja więcej niż jednego urządzenia typu adapter w komunikacji z robotem Kawasaki – skanerem – w protokole Ethernet/IP – odc.7
W tym odcinku dowiesz się jak skonfigurować komunikację więcej niż…
Bez kategorii
Konfiguracja komunikacji pomiędzy robotem Kawasaki – skanerem – a sterownikiem Horner – adapterem – w protokole komunikacyjnym Software Ethernet IP – odc.6
W tym odcinku znajdziesz informacje dotyczące sposobu konfiguracji robota Kawasaki - skanera… 2021-05-21 Tomasz Fuchs
Konfiguracja komunikacji pomiędzy robotem Kawasaki – skanerem – a sterownikiem Horner – adapterem – w protokole komunikacyjnym Software Ethernet IP – odc.6
W tym odcinku znajdziesz informacje dotyczące sposobu konfiguracji robota Kawasaki…
Bez kategorii
Konfiguracja komunikacji pomiędzy robotami Kawasaki w protokole komunikacyjnym Software Ethernet IP – odc.5
W tym odcinku dowiesz się jak skonfigurować komunikację pomiędzy robotami Kawasaki oraz… 2021-05-10 Tomasz Fuchs
Konfiguracja komunikacji pomiędzy robotami Kawasaki w protokole komunikacyjnym Software Ethernet IP – odc.5
W tym odcinku dowiesz się jak skonfigurować komunikację pomiędzy robotami…
Bez kategorii
Konfiguracja komunikacji pomiędzy robotem Kawasaki z kontrolerem F – adapterem – a sterownikiem Astraada ONE – skanerem – w protokole komunikacyjnym Software Ethernet IP – odc.4
Witaj w kolejnym odcinku kursu Ethernet IP w robotach Kawasaki. Pokażemy Ci… 2021-05-04 Jonasz Sobaniec
Konfiguracja komunikacji pomiędzy robotem Kawasaki z kontrolerem F – adapterem – a sterownikiem Astraada ONE – skanerem – w protokole komunikacyjnym Software Ethernet IP – odc.4
Witaj w kolejnym odcinku kursu Ethernet IP w robotach Kawasaki.…
Bez kategorii
Konfiguracja komunikacji pomiędzy robotem Kawasaki z kontrolerem F – skanerem – a sterownikiem Astraada ONE – adapterem – w protokole komunikacyjnym Software Ethernet IP – odc.3
W tym odcinku dowiesz się jak skonfigurować komunikację pomiędzy robotem Kawasaki z… 2021-04-19 Jonasz Sobaniec
Konfiguracja komunikacji pomiędzy robotem Kawasaki z kontrolerem F – skanerem – a sterownikiem Astraada ONE – adapterem – w protokole komunikacyjnym Software Ethernet IP – odc.3
W tym odcinku dowiesz się jak skonfigurować komunikację pomiędzy robotem…
Bez kategorii
Konfiguracja komunikacji pomiędzy robotem Kawasaki z kontrolerem E – skanerem – a sterownikiem Astraada ONE – adapterem – w protokole komunikacyjnym Software Ethernet IP – odc.1
Witaj w pierwszym odcinku kursu EthernetIP w robotach Kawasaki. Dowiesz się w… 2021-04-08 Jonasz Sobaniec
Konfiguracja komunikacji pomiędzy robotem Kawasaki z kontrolerem E – skanerem – a sterownikiem Astraada ONE – adapterem – w protokole komunikacyjnym Software Ethernet IP – odc.1
Witaj w pierwszym odcinku kursu EthernetIP w robotach Kawasaki. Dowiesz…
Bez kategorii
Robotowe porady techniczne: jak zmienić trajektorię robota za pomocą zewnętrznej siły?
Jedną z podstawowych zalet robotów przemysłowych oprócz prędkości jest ich precyzja –… 2019-11-27 Radosław Kołacz
Robotowe porady techniczne: jak zmienić trajektorię robota za pomocą zewnętrznej siły?
Jedną z podstawowych zalet robotów przemysłowych oprócz prędkości jest ich…
Bez kategorii
Robotowe porady techniczne: jak weryfikować stan robota przemysłowego Kawasaki w całym okresie jego eksploatacji?
Bardzo pomocne w zapewnieniu niezawodnej pracy robotów przemysłowych są dedykowane funkcjonalności wspierające… 2019-11-25 Marcin Tłustowski
Robotowe porady techniczne: jak weryfikować stan robota przemysłowego Kawasaki w całym okresie jego eksploatacji?
Bardzo pomocne w zapewnieniu niezawodnej pracy robotów przemysłowych są dedykowane…
Bez kategorii
Robotowe porady techniczne: jak zrobić korektę trajektorii spawania zrobotyzowanego?
Programujesz roboty spawalnicze? Pracujesz z nimi na co dzień? 2019-11-22 Kamil Majcher
Robotowe porady techniczne: jak zrobić korektę trajektorii spawania zrobotyzowanego?
Programujesz roboty spawalnicze? Pracujesz z nimi na co dzień?
Bez kategorii
Kawasaki przedstawia duAro 1, 2, 3: roboty współpracujące dla sektora produkcji
Rynek robotów współpracujących rośnie z roku na rok na całym świecie. Jednakże… 2019-07-05 Wojciech Trojniar
Kawasaki przedstawia duAro 1, 2, 3: roboty współpracujące dla sektora produkcji
Rynek robotów współpracujących rośnie z roku na rok na całym…
Bez kategorii
Jak wykorzystać robota Kawasaki do kształtowania prefabrykowanych elementów 3D?
Wykorzystanie robotów przemysłowych w automatyzacji procesów bezpośredniego tworzenia elementów budowlanych zyskuje nowy… 2019-01-11 Wojciech Trojniar