
Strona główna ASTOR
Roboty Kawasaki
39 postów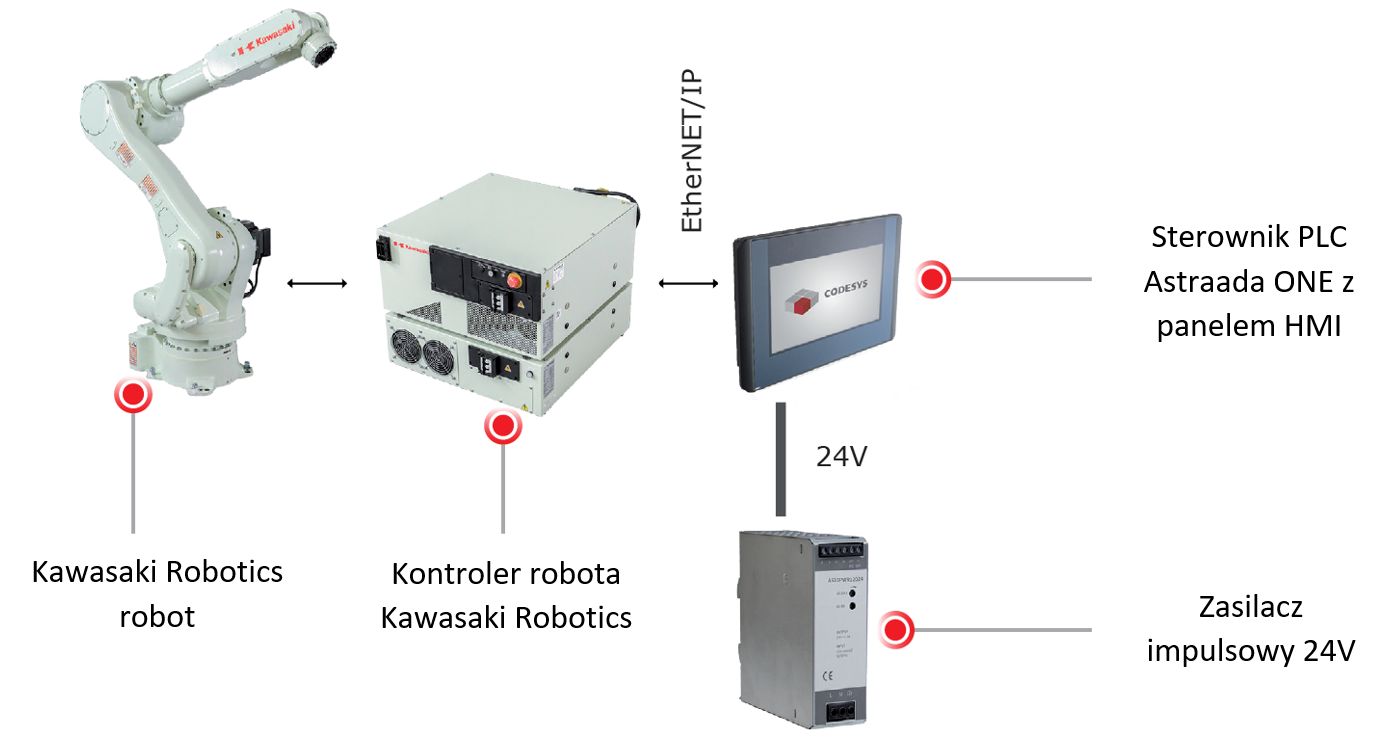
Automatyka w praktyce
Przesyłanie statusu połączenia i kodu błędów w czasie rzeczywistym | Wymiana danych pomiędzy robotem Kawasaki a sterownikiem PLC, odc. 1
Z tego artykułu dowiesz się, jak przygotować program dla kontrolera robota Kawasaki… 2024-09-02 Konrad Sendrowicz
Przesyłanie statusu połączenia i kodu błędów w czasie rzeczywistym | Wymiana danych pomiędzy robotem Kawasaki a sterownikiem PLC, odc. 1
Z tego artykułu dowiesz się, jak przygotować program dla kontrolera…
Podstawy automatyki
Coboty – wszystko, co musisz o nich wiedzieć
Coboty, czyli roboty współpracujące, to temat w ostatnich latach bardzo popularny. Urządzenia… 2024-08-16 Wojciech Trojniar
Coboty – wszystko, co musisz o nich wiedzieć
Coboty, czyli roboty współpracujące, to temat w ostatnich latach bardzo…
Automatyka w praktyce
15 rzeczy, które warto wiedzieć o obrotnikach spawalniczych, jeśli realizujesz zrobotyzowane spawanie
Z tego artykułu dowiesz się, co to jest obrotnik, do czego służy,… 2024-04-23 Grzegorz Wójtowicz
15 rzeczy, które warto wiedzieć o obrotnikach spawalniczych, jeśli realizujesz zrobotyzowane spawanie
Z tego artykułu dowiesz się, co to jest obrotnik, do…
Automatyka w praktyce
Jak zasymulować stanowisko zrobotyzowane za pomocą K-ROSET oraz KIDE na robocie Kawasaki, a następnie przenieść aplikację na robota edukacyjnego Astorino
Dzięki temu poradnikowi dowiesz się jak zasymulować proste stanowisko zrobotyzowane, programowane offline… 2023-12-18 Łukasz Giza
Jak zasymulować stanowisko zrobotyzowane za pomocą K-ROSET oraz KIDE na robocie Kawasaki, a następnie przenieść aplikację na robota edukacyjnego Astorino
Dzięki temu poradnikowi dowiesz się jak zasymulować proste stanowisko zrobotyzowane,…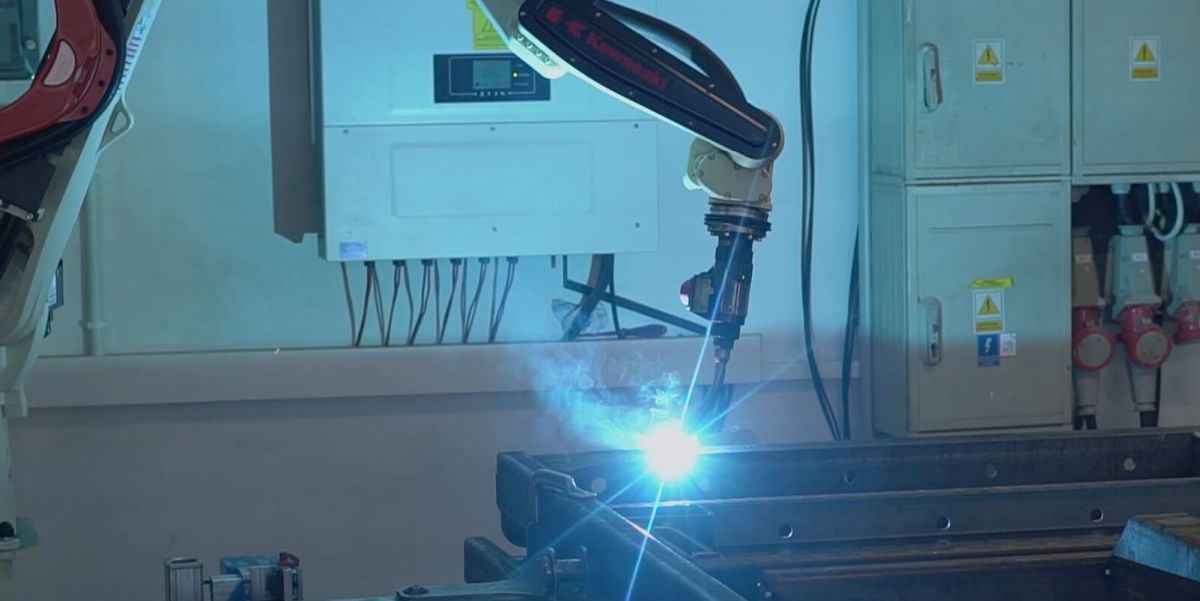
Podstawy automatyki
Robot spawalniczy i spawanie robotem spawalniczym – krótki przewodnik teoretyczny
Z artykułu dowiesz się, czym jest spawanie i czym różni się od… 2023-11-16 Daniel Ciochoń
Robot spawalniczy i spawanie robotem spawalniczym – krótki przewodnik teoretyczny
Z artykułu dowiesz się, czym jest spawanie i czym różni…
Automatyka w praktyce
Jak przeprowadzić serwis robota przemysłowego?
Pod lupę bierzemy etapy serwisu robota przemysłowego Kawasaki Robotics w firmie Tauron… 2023-09-14 Adrian Kociarz
Jak przeprowadzić serwis robota przemysłowego?
Pod lupę bierzemy etapy serwisu robota przemysłowego Kawasaki Robotics w…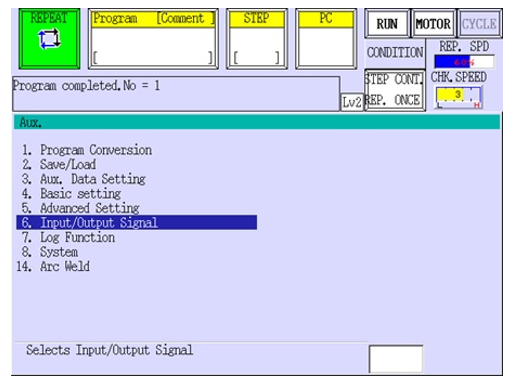
Automatyka w praktyce
Jak skonfigurować i uruchomić komunikację EtherNet/IP CIP Safety w robotach Kawasaki Robotics z modułem Cubic-S
Poznaj podstawy konfiguracji i uruchomienia bezpiecznej komunikacji Ethernet/IP CIP Safety na przykładzie… 2023-02-09 Piotr Kaczorowski
Jak skonfigurować i uruchomić komunikację EtherNet/IP CIP Safety w robotach Kawasaki Robotics z modułem Cubic-S
Poznaj podstawy konfiguracji i uruchomienia bezpiecznej komunikacji Ethernet/IP CIP Safety… Automatyka w praktyce
Integracja robota przemysłowego ze sterownikiem PLC i panelem HMI – dlaczego warto?
Jaki sens ma łączenie robota przemysłowego z panelem operatorskim albo sterownikiem PLC?… 2023-02-04 Konrad Sendrowicz
Integracja robota przemysłowego ze sterownikiem PLC i panelem HMI – dlaczego warto?
Jaki sens ma łączenie robota przemysłowego z panelem operatorskim albo…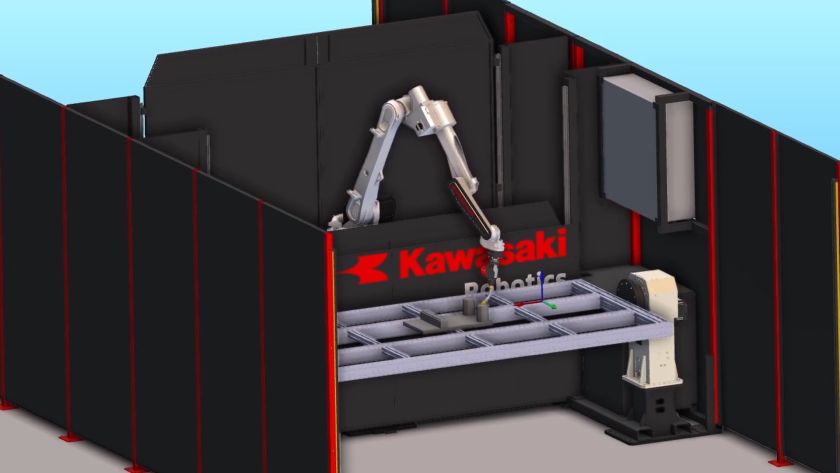
Automatyka w praktyce
K-Virtual: wydajne rozwiązanie CAD/CAM dla technologów zrobotyzowanego spawania
K-Virtual to innowacyjne oprogramowanie, dzięki któremu technolodzy spawania mogą szybciej i łatwiej… 2023-01-09 Kamil Majcher
K-Virtual: wydajne rozwiązanie CAD/CAM dla technologów zrobotyzowanego spawania
K-Virtual to innowacyjne oprogramowanie, dzięki któremu technolodzy spawania mogą szybciej…
Bez kategorii
5 rzeczy o robocie przemysłowym, które robotyk wiedzieć powinien
Z tego artykułu dowiesz się, co to jest i z czego się… 2022-04-14 Kamil Majcher
5 rzeczy o robocie przemysłowym, które robotyk wiedzieć powinien
Z tego artykułu dowiesz się, co to jest i z…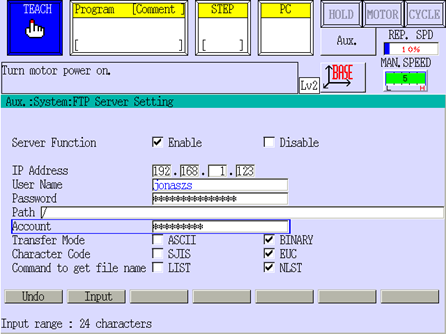
Bez kategorii
Konfiguracja komunikacji pomiędzy robotem przemysłowym a serwerem FTP. | Kurs opcji komunikacyjnych i systemowych w robotach Kawasaki Robotics odc. 1
W tym odcinku pokażemy Ci, jak skonfigurować robota Kawasaki Robotics z kontrolerem… 2022-03-10 Jonasz Sobaniec
Konfiguracja komunikacji pomiędzy robotem przemysłowym a serwerem FTP. | Kurs opcji komunikacyjnych i systemowych w robotach Kawasaki Robotics odc. 1
W tym odcinku pokażemy Ci, jak skonfigurować robota Kawasaki Robotics…
Bez kategorii
Jak zapewnić bezawaryjne działanie kontrolerów do robotów w różnych warunkach przemysłowych na przykładzie F60 od Kawasaki Robotics.
Kontroler jest jednostką sterującą do robotów przemysłowych. Kontroler pełni funkcję mózgu całej… 2022-03-04 Klaudia Rzeszowska