
Strona główna ASTOR
Kontrolery Kawasaki
16 postów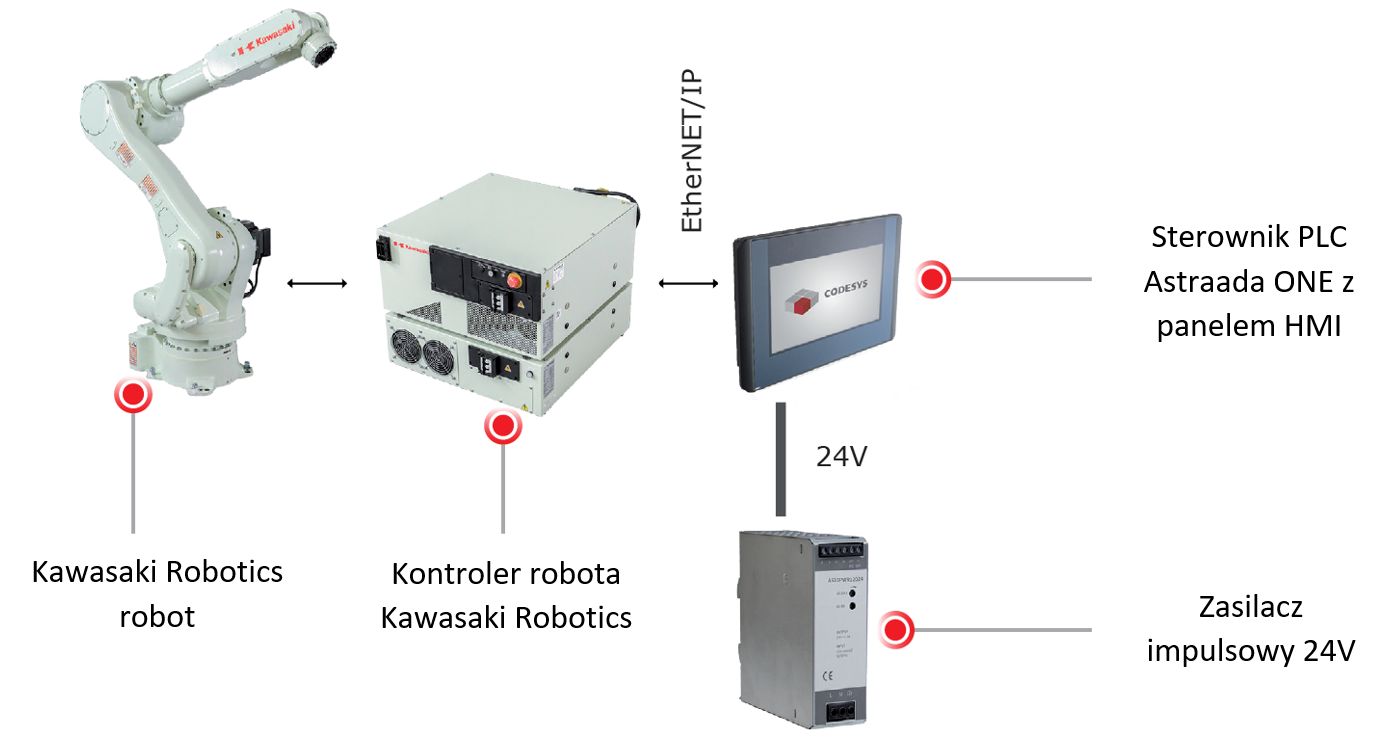
Automatyka w praktyce
Przesyłanie ze sterownika PLC do robota pełnej nazwy programu do wykonania | Wymiana danych pomiędzy robotem Kawasaki a sterownikiem PLC, odc. 11
To ostatnia część naszego poradnika, wykorzystująca poprzednie artykuły dotyczące przesyłania ciągu znaków.… 2025-03-11 Konrad Sendrowicz
Przesyłanie ze sterownika PLC do robota pełnej nazwy programu do wykonania | Wymiana danych pomiędzy robotem Kawasaki a sterownikiem PLC, odc. 11
To ostatnia część naszego poradnika, wykorzystująca poprzednie artykuły dotyczące przesyłania… Automatyka w praktyce
Przesyłanie do sterownika PLC historii ostatnich błędów z robota | Wymiana danych pomiędzy robotem Kawasaki a sterownikiem PLC, odc. 10
W tej części przygotowana zostanie procedura przesłania 50 ostatnich błędów z robota… 2025-03-07 Konrad Sendrowicz
Przesyłanie do sterownika PLC historii ostatnich błędów z robota | Wymiana danych pomiędzy robotem Kawasaki a sterownikiem PLC, odc. 10
W tej części przygotowana zostanie procedura przesłania 50 ostatnich błędów… Automatyka w praktyce
Odbieranie zmiennej tekstowej za pośrednictwem standardowego protokołu komunikacyjnego | Wymiana danych pomiędzy robotem Kawasaki a sterownikiem PLC, odc. 9
W tej części poradnika pokażemy, jak odebrać zmienną tekstową od sterownika PLC,… 2025-01-07 Konrad Sendrowicz
Odbieranie zmiennej tekstowej za pośrednictwem standardowego protokołu komunikacyjnego | Wymiana danych pomiędzy robotem Kawasaki a sterownikiem PLC, odc. 9
W tej części poradnika pokażemy, jak odebrać zmienną tekstową od… Automatyka w praktyce
Wysyłanie zmiennej tekstowej za pośrednictwem standardowego protokołu komunikacyjnego | Wymiana danych pomiędzy robotem Kawasaki a sterownikiem PLC, odc. 8
W tej części poradnika pokażemy, jak wysłać z robota zmienną tekstową za… 2025-01-06 Konrad Sendrowicz
Wysyłanie zmiennej tekstowej za pośrednictwem standardowego protokołu komunikacyjnego | Wymiana danych pomiędzy robotem Kawasaki a sterownikiem PLC, odc. 8
W tej części poradnika pokażemy, jak wysłać z robota zmienną… Automatyka w praktyce
Przesyłanie dużych ilości danych przy użyciu ograniczonej liczby zajętych bitów – zwielokrotnianie danych | Wymiana danych pomiędzy robotem Kawasaki a sterownikiem PLC, odc. 7
Z tej części poradnika dowiesz się, jak wysyłać dużą ilość informacji z… 2025-01-03 Konrad Sendrowicz
Przesyłanie dużych ilości danych przy użyciu ograniczonej liczby zajętych bitów – zwielokrotnianie danych | Wymiana danych pomiędzy robotem Kawasaki a sterownikiem PLC, odc. 7
Z tej części poradnika dowiesz się, jak wysyłać dużą ilość… Automatyka w praktyce
Ogólna modyfikacja komunikacji i zmiana typu danych | Wymiana danych pomiędzy robotem Kawasaki a sterownikiem PLC, odc. 6
Z tej części poradnika dowiesz się, jak modyfikować parametry komunikacji, liczbę bajtów… 2024-12-28 Konrad Sendrowicz
Ogólna modyfikacja komunikacji i zmiana typu danych | Wymiana danych pomiędzy robotem Kawasaki a sterownikiem PLC, odc. 6
Z tej części poradnika dowiesz się, jak modyfikować parametry komunikacji,…
Dla użytkowników produktów…
74 funkcje i opcje w robotach Kawasaki Robotics, które chcesz poznać jako robotyk
W tym artykule przedstawiamy 74 funkcje i opcje, które są dostępne w… 2024-10-30 Piotr Kaczorowski
74 funkcje i opcje w robotach Kawasaki Robotics, które chcesz poznać jako robotyk
W tym artykule przedstawiamy 74 funkcje i opcje, które są… Automatyka w praktyce
Przesyłanie aktualnej pozycji i dystansu do kolejnego punktu | Wymiana danych pomiędzy robotem Kawasaki a sterownikiem PLC, odc. 5
W tej części tego poradnika dowiesz się, jak wysyłać informacje o pozycji… 2024-09-23 Konrad Sendrowicz
Przesyłanie aktualnej pozycji i dystansu do kolejnego punktu | Wymiana danych pomiędzy robotem Kawasaki a sterownikiem PLC, odc. 5
W tej części tego poradnika dowiesz się, jak wysyłać informacje… Automatyka w praktyce
Przesyłanie parametrów ruchu w czasie rzeczywistym i informacji o wykonanym programie | Wymiana danych pomiędzy robotem Kawasaki a sterownikiem PLC, odc. 4
Z tej części naszego cyklu dowiesz się, jak wysyłać z robota jego… 2024-09-16 Konrad Sendrowicz
Przesyłanie parametrów ruchu w czasie rzeczywistym i informacji o wykonanym programie | Wymiana danych pomiędzy robotem Kawasaki a sterownikiem PLC, odc. 4
Z tej części naszego cyklu dowiesz się, jak wysyłać z… Automatyka w praktyce
Przesyłanie dedykowanych sygnałów wejściowych i wyjściowych | Wymiana danych pomiędzy robotem Kawasaki a sterownikiem PLC, odc. 3
Z tej części naszego cyklu dowiesz się, jak używać dedykowanych sygnałów i… 2024-09-11 Konrad Sendrowicz
Przesyłanie dedykowanych sygnałów wejściowych i wyjściowych | Wymiana danych pomiędzy robotem Kawasaki a sterownikiem PLC, odc. 3
Z tej części naszego cyklu dowiesz się, jak używać dedykowanych… Automatyka w praktyce
Przesyłanie danych robota (typ, numer seryjny, godziny pracy i zużyta energia) | Wymiana danych pomiędzy robotem Kawasaki a sterownikiem PLC, odc. 2
Z tego odcinka dowiesz się, jak wysłać z robota jego nazwę, numer… 2024-09-05 Konrad Sendrowicz
Przesyłanie danych robota (typ, numer seryjny, godziny pracy i zużyta energia) | Wymiana danych pomiędzy robotem Kawasaki a sterownikiem PLC, odc. 2
Z tego odcinka dowiesz się, jak wysłać z robota jego… Automatyka w praktyce
Przesyłanie statusu połączenia i kodu błędów w czasie rzeczywistym | Wymiana danych pomiędzy robotem Kawasaki a sterownikiem PLC, odc. 1
Z tego artykułu dowiesz się, jak przygotować program dla kontrolera robota Kawasaki… 2024-09-02 Konrad Sendrowicz