Roboty SCARA – wszystko, co musisz o nich wiedzieć
Kontakt w sprawie artykułu: Mateusz Krzyś - 2024-04-09

Z tego artykułu dowiesz się:
- czym jest robot SCARA i jakie są jego najważniejsze cechy,
- jakie są najpopularniejsze zastosowania robotów SCARA,
- czym SCARA różni się od tradycyjnego robota sześcioosiowego.
Roboty SCARA charakteryzują się oryginalną konstrukcją, różniącą się znacznie od typowych robotów przemysłowych. Ze względu na swoją precyzję, szybkość i elastyczność zyskały one dużą popularność. Czym jest robot SCARA? Jakie są jego najważniejsze cechy? W jakich zastosowaniach sprawdzi się najlepiej?
Robot SCARA – co to jest?
Zacznijmy od nazwy. Określenie „SCARA” oryginalnie było skrótem od „Selective Compliance Assembly Robot Arm” (ang. robot montażowy z selektywną podatnością). Początkowo bowiem przeznaczeniem tych urządzeń było wsparcie procesów montażu. Z czasem jednak okazało się, że roboty SCARA znajdują również wiele innych zastosowań, dlatego obecnie akronim „SCARA” rozwijany jest jako „Selective Compliance Arcticulated Robot Arm” (ang. robot przegubowy z selektywną podatnością).
Najważniejszą cechą odróżniającą roboty SCARA od innych robotów przemysłowych jest ich specyficzna konstrukcja. Są to urządzenia czteroosiowe, których podstawą jest nieruchoma baza, najczęściej montowana do posadzki, lub ewentualnie do ściany albo sufitu. Pierwsze ramię robota obraca się wokół tej bazy (jest to pierwsza oś), natomiast drugie ramię obraca się wokół tego pierwszego (to jest druga oś). Trzecia oś jest jedyną osią liniową i odpowiada ona za ruch góra-dół narzędzia lub chwytaka, zamontowanego na końcu drugiego ramienia. Czwarta oś natomiast odpowiada za obrót tym narzędziem.
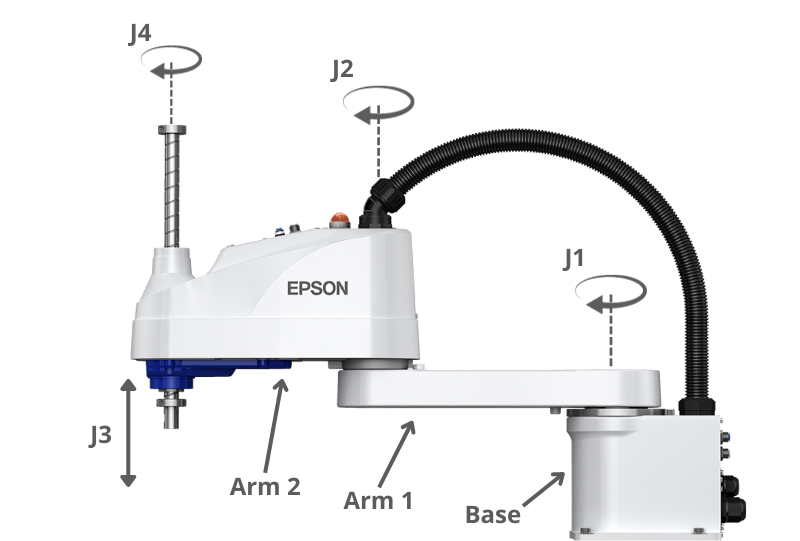
Z opisanej wyżej konstrukcji robotów SCARA wynika ich interesująca i przydatna cecha charakterystyczna – jest nią występująca w nazwie „selektywna podatność”. Wynika ona z tego, że obrotowe osie J1 i J2 są pionowe, a więc obrót obu ramion następuje w płaszczyźnie poziomej. Z tego względu grawitacja nie ma wpływu na te osie, mogą więc one być pozbawione hamulców. Po zatrzymaniu robota, gdy napędy osi J1 i J2 są wyłączone, to robot w płaszczyźnie X-Y jest podatny, a więc może w tych osiach poddawać się zewnętrznym siłom. Warto zaznaczyć, że w osi pionowej Z w takiej sytuacji zachowana jest sztywność. Może to być przydatne w praktyce, np. w przypadku aplikacji, gdzie mamy do czynienia z wciskaniem jedynych elementów w inne. W takim przypadku podatność w płaszczyźnie poziomej pozwala robotowi dopasować się do pozycji otworu w detalu bez wykorzystywania dodatkowych czujników siły.
Selektywną podatność robota SCARA można również wykorzystać, aby ułatwić jego programowanie. Aby nauczyć robota poszczególnych punktów, wystarczy po prostu ręcznie ustawić go we właściwej pozycji. Dotyczy to również osi liniowej J3, mimo że jest ona – jak wspomnieliśmy wyżej – wyposażona w hamulec, który jednak można zwolnić za pomocą specjalnego przycisku i również tą osią poruszać ręcznie.
Roboty SCARA – różne modele, różne możliwości
Przeglądając ofertę robotów SCARA zauważymy, że oferowane są bardzo liczne modele. Mogą one różnić się podstawowymi parametrami, takimi jak zasięg, czy udźwig, a także dokładnością, prędkością, sposobem montażu czy środowiskiem pracy. Dostępne są warianty odporne na zapylenie, a także przeznaczone do pracy w środowisku o dużej czystości (clean room). Istnieją również modele ESD, w których cała obudowa przewodzi ładunki elektrostatyczne, dzięki czemu nie gromadzą się one, ale mogą być łatwo odprowadzone do uziemienia. Jest to bardzo istotne w przypadku, gdy robot pracuje z delikatnymi elementami elektronicznymi.
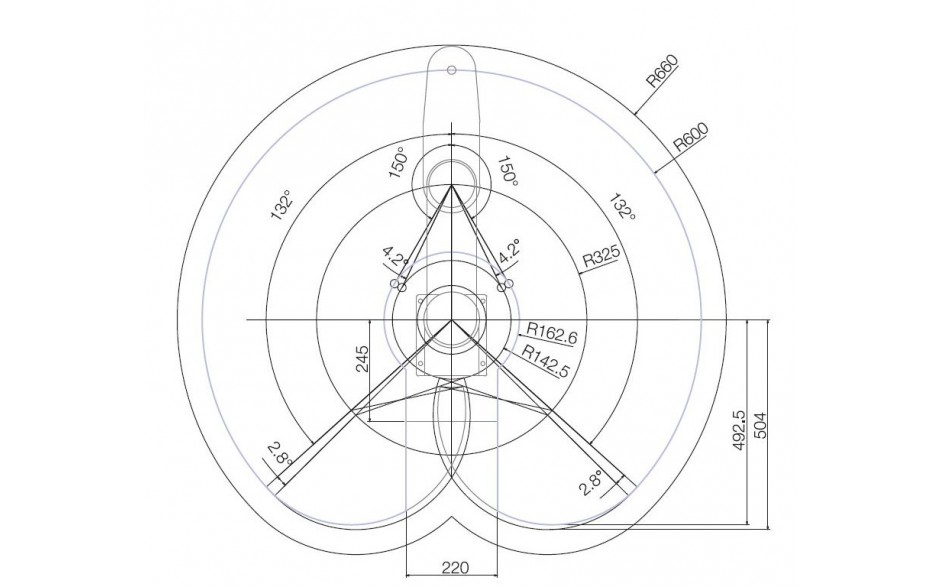
W przypadku zdecydowanej większości robotów SCARA maksymalny udźwig wynosi od 1 do 20 kg, natomiast długość ramion zapewnia uzyskanie pola roboczego o promieniu do jednego metra (czyli pole robocze może mieć średnicę ok. 2 metrów). Roboty SCARA są bardzo kompaktowe. Ich niewielkie rozmiary oraz stosunkowo ograniczona przestrzeń robocza sprawiają, że z jednej strony wymagają one niewiele miejsca, a z drugiej – łatwiejsze jest projektowanie stanowiska.
Ciekawą opcją jest możliwość zastosowania pierwszego ramienia, które jest lekko wygięte w wybraną stronę (w prawo lub w lewo). Dzięki takiemu rozwiązaniu przestrzeń robocza jest z jednej strony większa – w uproszczeniu mówiąc robot może sięgnąć tam dalej. W zależności od układu całego stanowiska może to być bardzo przydatne. Możemy łatwo poszerzyć zasięg robota tam, gdzie jest to potrzebne, kosztem drugiej strony, gdzie np. robot i tak nie pracuje, ponieważ jest tam wygrodzenie, lub po prostu stanowisko się kończy.
Roboty SCARA mogą być opcjonalnie wyposażane w różnego rodzaju osprzęt rozszerzający ich funkcjonalność. Najczęściej stosowanymi tego rodzaju akcesoriami są systemy wizyjne i systemy śledzenia taśmy.
Dowiedz się więcej o robotach przemysłowych Epson SCARA.
Roboty SCARA – typowe zastosowania
1. Produkcja elektroniki
Roboty SCARA są nieocenione w montażu komponentów elektronicznych na płytach drukowanych. Wykorzystuje się je do precyzyjnego umieszczania elementów, lutowania, testowania i inspekcji jakości.
2. Przemysł motoryzacyjny
Roboty SCARA pomagają w montażu małych i skomplikowanych komponentów samochodowych, takich jak wtryskiwacze paliwa, moduły elektroniczne czy elementy zawieszenia. Mogą być także wykorzystywane w procesie produkcyjnym samochodów do testowania i pakowania gotowych podzespołów.
3. Przemysł spożywczy
Roboty SCARA automatyzują proces sortowania i pakowania produktów spożywczych. Mogą być również wykorzystywane do precyzyjnego nakładania etykiet na opakowania produktów spożywczych oraz do identyfikacji partii produktów.
4. Przemysł farmaceutyczny
W farmacji roboty SCARA są wykorzystywane do pakowania leków w opakowania, zapewniając prawidłową ilość leków w każdym opakowaniu. Wykorzystuje się je też do dokładnej kontroli jakości opakowań.
Robot SCARA a robot sześcioosiowy – czym się różnią?
Podstawowa różnica pomiędzy robotami SCARA a sześcioosiowymi wynika z ich odmiennej konstrukcji. Te pierwsze mają cztery osie i ograniczoną przestrzeń roboczą. Pracują w płaszczyźnie poziomej i mogą przenosić przedmioty na płaskiej powierzchni. Ruch pionowy ograniczony jest długością śruby. Nie ma też możliwości swobodnego manipulowania elementami, mogą one być tylko obracane dookoła osi pionowej. Jest to w pełni wystarczające w przypadku operacji np. przenoszenia detali z linii produkcyjnej na maszynę albo pomiędzy dwiema liniami. Uniemożliwia natomiast nieograniczone przemieszczanie i obracanie przedmiotów.
Roboty sześcioosiowe, jak sama nazwa wskazuje, mają sześć stopni swobody. Mogą więc dowolnie przenosić przedmioty w całej przestrzeni roboczej i dowolnie zmieniać ich orientację. Roboty SCARA mają prostszą konstrukcję, a tym samym prostszą kinematykę. Jedną z konsekwencji jest np. dużo mniejsze zagrożenie osobliwościami. Jedyną sytuacją, w której możemy mieć do czynienia z osobliwością, jest moment całkowitego wyprostowania ramienia, czyli osiągnięcie maksymalnego zasięgu robota.
Drugą konsekwencją prostszej kinematyki jest łatwiejsze programowanie ruchu. W przypadku robota sześcioosiowego programując prosty ruch z punktu A do punktu B musimy brać pod uwagę sporo czynników, dużo trudniejsze jest również zabezpieczenie przed kolizjami. Robot SCARA jest dużo bardziej przewidywalny – pierwsze dwie osie skutkują obrotem urządzenia w jednej płaszczyźnie, a trzecia oś daje gwarancję uzyskania szybkiego i bardzo precyzyjnego liniowego ruchu w pionie (a warto pamiętać, że w robocie sześcioosiowym pionowy ruch liniowy wymaga uruchomienia przynajmniej trzech osi obrotowych).
Do dyspozycji programisty jest np. predefiniowany szablon ruchu typu „jump” (różnie nazywany przez różnych producentów). Polega on na szybkim przesunięciu przedmiotu w górę (w osi Z, bez obracania pierwszymi dwiema osiami), następnie bez zmiany wysokości przedmiot jest przesuwany (obracają się osie J1 i J2, J3 pozostaje nieruchoma), a następnie przedmiot jest upuszczany (ponownie bez poruszania osiami J1 i J2). Dzięki temu wystarczy zaprojektować stanowisko tak, aby robot nie zahaczył o nic mając maksymalnie wysuniętą w górę śrubę. Wtedy mamy gwarancję, że nie dojdzie do żadnej kolizji, a przenoszenie może odbywać się z pełną prędkością. W efekcie gdy mamy do czynienia z krótkimi ruchami, robot SCARA jest po prostu wyraźnie szybszy od sześcioosiowego.
Jednocześnie roboty tego typu charakteryzują się lepszą powtarzalnością. Przyczyna jest ta sama: prostsza konstrukcja. Na błąd pozycjonowania wpływają w praktyce tylko dwie osie obrotowe i jedna liniowa, podczas gdy w przypadku robotów sześcioosiowych sumują się błędy aż sześciu osi obrotowych. Dodatkowo w SCARA-ch dużo mniejszy jest też wpływ wibracji.
Np. porównując standardowe modele o udźwigu 6 kg typowy robot sześcioosiowy może osiągnąć powtarzalność na poziomie 0,03 mm, podczas gdy w przypadku standardowego robota SCARA będzie to 0,02 mm, natomiast gdy zastosujemy precyzyjniejszy model z wyższej półki, bez problemu osiągniemy 0,015 mm. Oznacza to dwa razy lepszą powtarzalność przy takim samym maksymalnym udźwigu. Można zatem powiedzieć, że roboty SCARA są jednocześnie bardzo szybkie – i bardziej powtarzalne.
Prostsza konstrukcja oznacza też prostsze serwisowanie. Roboty SCARA są mniejsze, mają mniej napędów. Wykorzystywane są w nich przekładnie harmoniczne, które są niemal bezobsługowe, nie wymagają wymiany smarów ani przeglądów.
Robot SCARA czy robot sześcioosiowy – który wybrać?
Biorąc pod uwagę powyższe porównanie jest jasne, że w pewnych zastosowaniach robot sześcioosiowy jest niezastąpiony. Będzie tak w przypadku, gdy potrzebujemy większego udźwigu, większej przestrzeni roboczej lub pełnej swobody w manipulowania przedmiotem. Wszędzie tam, gdzie mamy do czynienia z pracą w trzech wymiarach, operacjami w trudno dostępnych miejscach, precyzyjnym cięciem, spawaniem, szlifowaniem, czy malowaniem, a także gdy wymagana jest obsługa zaawansowanych narzędzi – robot SCARA nie sprawdzi się, a właściwym wyborem będzie bardziej elastyczny robot sześcioosiowy.

Natomiast w zastosowaniach takich, jak montaż, przenoszenie przedmiotów na liniach produkcyjnych, pakowanie czy selekcja elementów, a więc tam, gdzie potrzebujemy szybkich, powtarzalnych ruchów w płaszczyźnie poziomej, robot SCARA będzie rozwiązaniem optymalnym. Podsumujmy tu kilka najistotniejszych powodów:
1. W aplikacjach, do których są przeznaczone, roboty SCARA są wydajniejsze. Dla krótkich ruchów wykonywanych w ramach poziomej płaszczyzny są dużo szybsze, a do tego zapewniają lepszą powtarzalność.
2. Dzięki prostszej konstrukcji roboty SCARA są łatwiejsze w utrzymaniu. Łatwiej je serwisować, nie wymagają przeglądów i wymiany smarów.
3. Roboty SCARA są prostsze w programowaniu. Programowanie aplikacji jest szybsze i łatwiejsze.
4. Roboty SCARA są bardziej kompaktowe. Zajmują mniej przestrzeni, niż roboty sześcioosiowe, co jest bardzo cenne biorąc pod uwagę fakt, że w realiach produkcyjnych często mamy do czynienia z ograniczoną ilością miejsca.
5. Łatwiej jest zapewnić bezpieczeństwo w aplikacjach z robotem SCARA. Takie stanowiska są prostsze do wygrodzenia, łatwiej jest kontrolować przestrzeń roboczą, a same roboty mają małe udźwigi.
6. Roboty SCARA są tańsze od odpowiadających im parametrami zasięgu i udźwigu robotów sześcioosiowych.
Można zatem powiedzieć, że w przypadku gdy parametry i możliwości robota SCARA są wystarczające i spełniają wymagania konkretnego stanowiska, będzie on lepszym wyborem.
Autorzy:
Radosław Kołacz
Mateusz Krzyś
Sprawdź ofertę robotów przemysłowych Epson SCARA w sklepie internetowym ASTOR.