Obsługa systemu wizyjnego OpenMV
Astorino – kurs dla początkujących #3
Kontakt w sprawie artykułu: Kamila Jaworowska - 2023-06-02
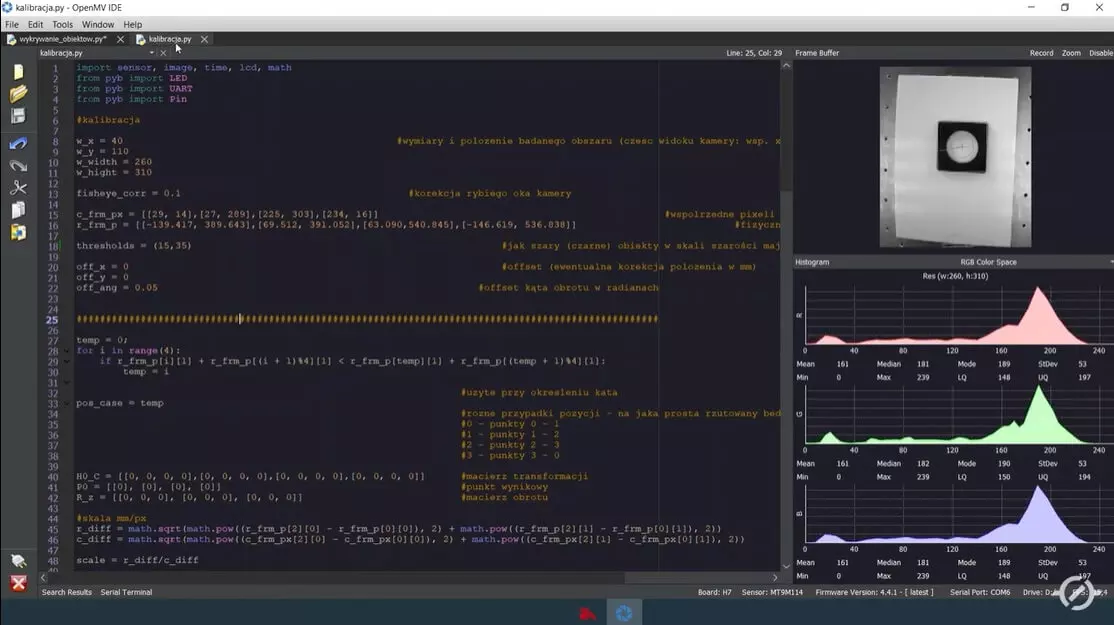
W trzecim odcinku naszego kursu:
- W jaki sposób kalibrować system wizyjny OpenMV razem z robotem Astorino?
- Jak zamontować statyw z kamerą wizyjną?
- Jak podłączyć kamerę, komputer i robota ze sobą?
- Jakie są możliwości kamery OpenMV?
- Jak dostosować kalibrację kamery do oświetlenia pomieszczenia?
- Jakie podstawy języka Python są potrzebne do obsługi i programowania systemu wizyjnego?
- Omówienie parametrów obszaru i lokalizacji detalu.
- Analiza widoku z kamery i dostosowanie kalibracji.
- Korekcje.
- Uruchomienie robota i ręczna kalibracja punktów poruszania się robota.
- Ustawienie skali szarości.
- Programowanie wykrywania obiektów i komunikacja po UART.
- Zapisywanie programu do kamery wizyjnej.
- Konfiguracja w środowisku programistycznym Astorino.
- Uruchamianie programu na system wizyjny.
- Testy i adjustacje parametrów w oprogramowaniu OpenMV IDE.
- Testy dla innych lokalizacji i ustawień detalu.
Robot edukacyjny Astorino – kurs dla początkujących
1. Unboxing robota edukacyjnego Astorino. 2. Szybki start z robotem edukacyjnym Astorino. 3. Obsługa systemu wizyjnego OpenMV. 4. Obsługa podajnika z magazynkiem kostek. 5. Wyznaczanie przestrzeni roboczej robota Astorino. 6. Wyznaczanie układu współrzędnych – metoda 4-punktowa. 7. Tryby poruszania się robota Astorino. 8. Instrukcja: utrata komunikacji z programem sterującym. 9. Zapisywanie punktów i programów sterujących.W następnym odcinku: Obsługa podajnika z magazynkiem kostek jako osprzętu do robota Astorino.
Robot edukacyjny 6-osiowy Astorino służy do nauki kwalifikacji ELM.07 i ELM.08 w klasach o profilu technik robotyk, na uczelniach, w centrach kształcenia zawodowego i praktycznego.
Astorino przygotowuje uczniów i studentów do egzaminów zawodowych i do pracy w przemyśle.
Dowiedz się więcej o robocie Astorino.