Konfiguracja komunikacji pomiędzy robotem Kawasaki z kontrolerem F – adapterem – a sterownikiem Astraada ONE – skanerem – w protokole komunikacyjnym Software Ethernet IP – odc.4
Kontakt w sprawie artykułu: Jonasz Sobaniec - 2021-05-04
Z tego artykułu dowiesz się:
- o poszczególnych opcjach menu aux oraz jak je znaleźć na teach pendancie robota Kawasaki,
- jak skonfigurować porty i sygnały na robocie Kawasaki,
- o konfiguracji komunikacji pod sterownik PLC Astraada One,
- jak sprawdzić poprawność działania połączenia.
Witaj w kolejnym odcinku kursu Ethernet IP w robotach Kawasaki. Pokażemy Ci w nim jak skonfigurować komunikację pomiędzy robotem Kawasaki z kontrolerem F – adapterem – a sterownikiem Astraada ONE – skanerem.
Kurs Ethernet IP w robotach Kawasaki
Komunikacyjnym Software Ethernet IP – odc.5
sterownikiem Horner (adapterem) w protokole komunikacyjnym Ethernet IP – odc.6
Robotem Kawasaki – skanerem – w protokole Ethernet IP – odc.7
Dodatkowe materiały i lekcje dla kursantów:
1. Opis poszczególnych opcji menu aux oraz jak znaleźć menu na teach pendancie
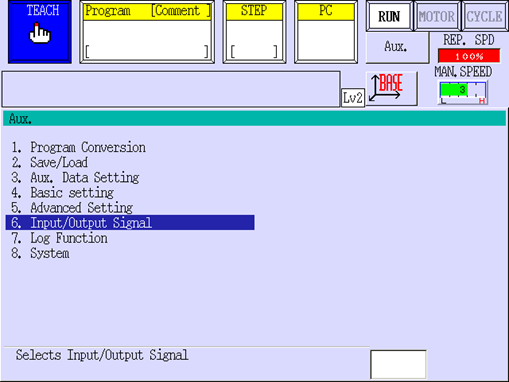
Menu AUX FUNCTION uruchamiasz z poziomu teach pendant’a. Znajdują się w nim podstawowe ustawienia robota Kawasaki. Menu to podzielone jest na 8 części:
1. Program Conversion
2. Save/Load
3. Aux. Data Setting
4. Basic Setting
5. Advanced Setting
6. Input/Output Signal
7. Log Function
8. System
Wszystkie ustawienia dotyczące komunikacji w tym protokole znajdują się w menu 6. Input/Output Signal.
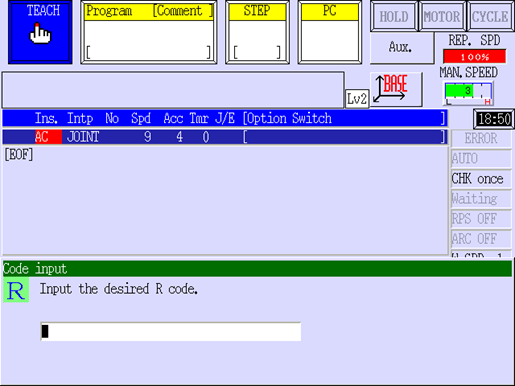
Poniżej podano również szybkie odnośniki do danych stron w formie np. (AUX.0609-20-1). Aby skorzystać z tej opcji, gdy jesteś w widoku ogólnym – wybierz przycisk R.
Później wpisz daną komendę do okna:
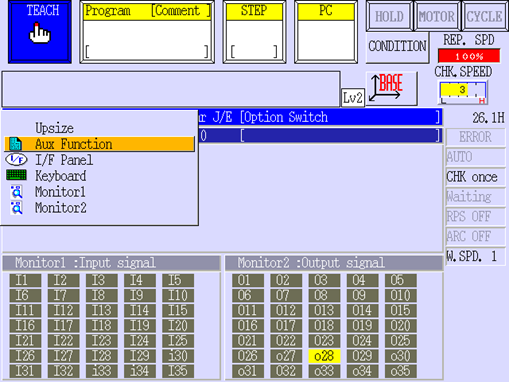
Aby otworzyć menu, naciśnij na klawiaturze teach pendant’a przycisk MENU.
Wybieraj opcje za pomocą strzałek.
Następnie zatwierdź wybór przyciskiem ENTER:
Wybierz opcję 6. Input/Output Signal.
2. Konfiguracja portów i sygnałów.
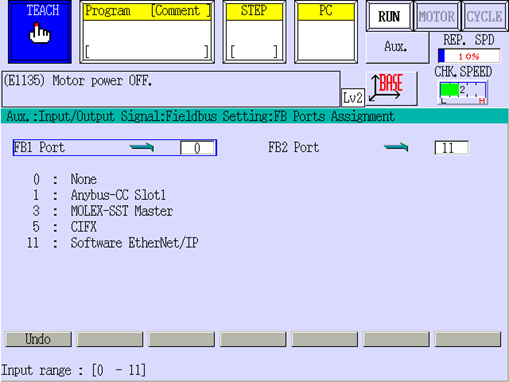
1. Ustaw porty dla robota Kawasaki i sterownika PLC Astraada One. (AUX.0609-1)
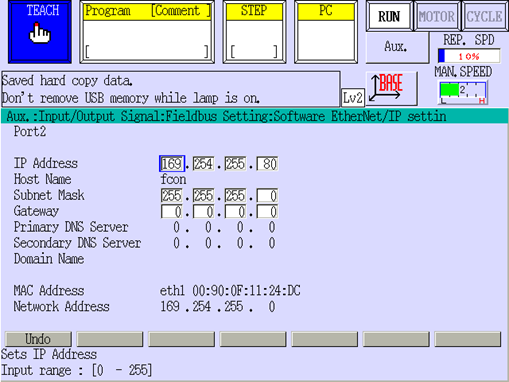
2. Ustaw adresy IP pamiętając, że tylko port 2 na robocie Kawasaki pozwala na obsługę komunikacji ze sterownikiem. (AUX.0609-20-1)
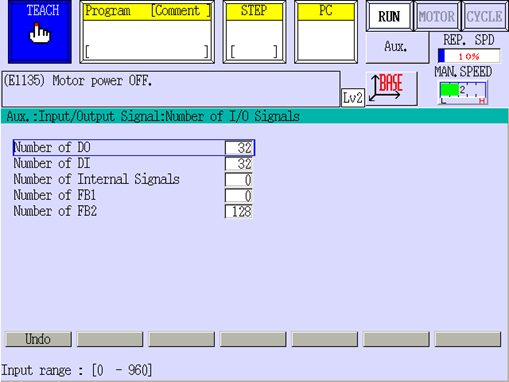
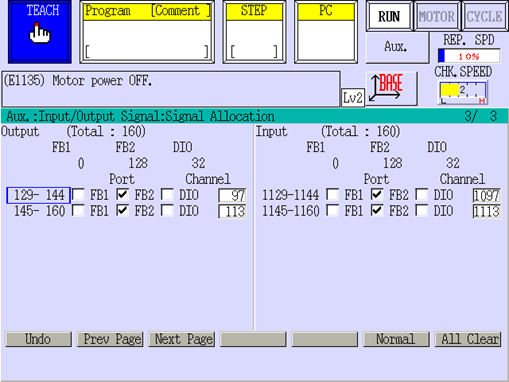
3. Przypisz odpowiednią liczbę sygnałów. Możesz przypisać ich więcej i nie wykorzystać ich, natomiast nie możesz przypisać mniej niż wykorzystasz. (Poniższe przypisanie jest przykładowe, dla różnych urządzeń będzie różniło się od tego w zależności od parametrów). (https://idepfoundation.org) (AUX.0611)
4. Przypisz sygnały. (AUX.0608)
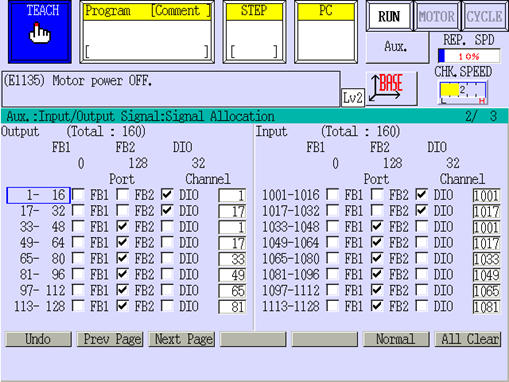
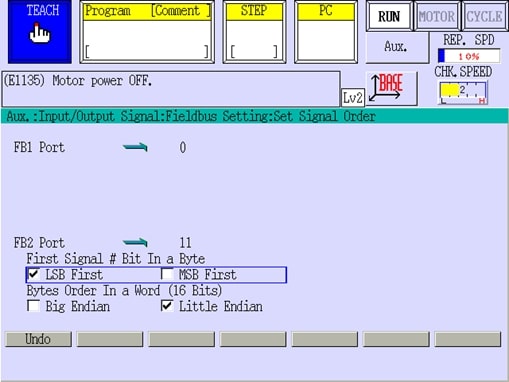
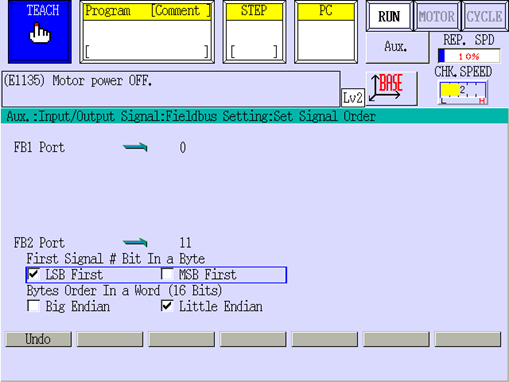
5. Ustal sekwencję sygnałów. (AUX.0609-2)
Robot Kawasaki może obsłużyć do 3 urządzeń – adapterów, samemu będąc scannerem lub 1 urządzenie – scanner, gdy sam jest adapterem.
3. Konfiguracja komunikacji pod sterownik PLC Astraada One.
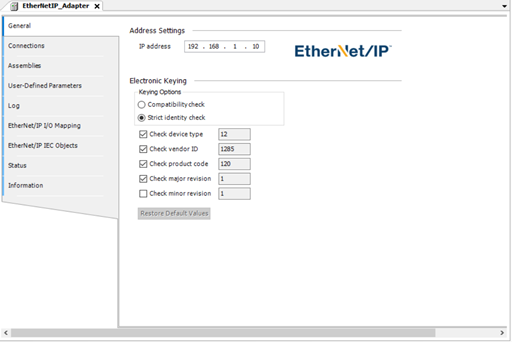
1. Aby sterownik danego producenta mógł współpracować z robotem Kawasaki, ustaw komunikację zgodnie z zaleceniami producenta. Najważniejsze jest poprawne ustawienie adresów IP oraz instancji. Adres IP sterownika robot uzyskuje samoczynnie. (AUX.0609-9-20-3)
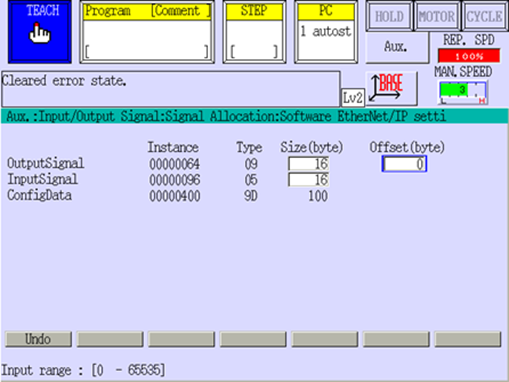
Uwaga: Na powyższym zdjęciu rozmiar ramki to 16 bajtów wyjść x 16 bajtów wejść, czyli 128 x 128 w bitach. To ustawienie zrobione niewłaściwie jest częstą przyczyną błędu komunikacji.
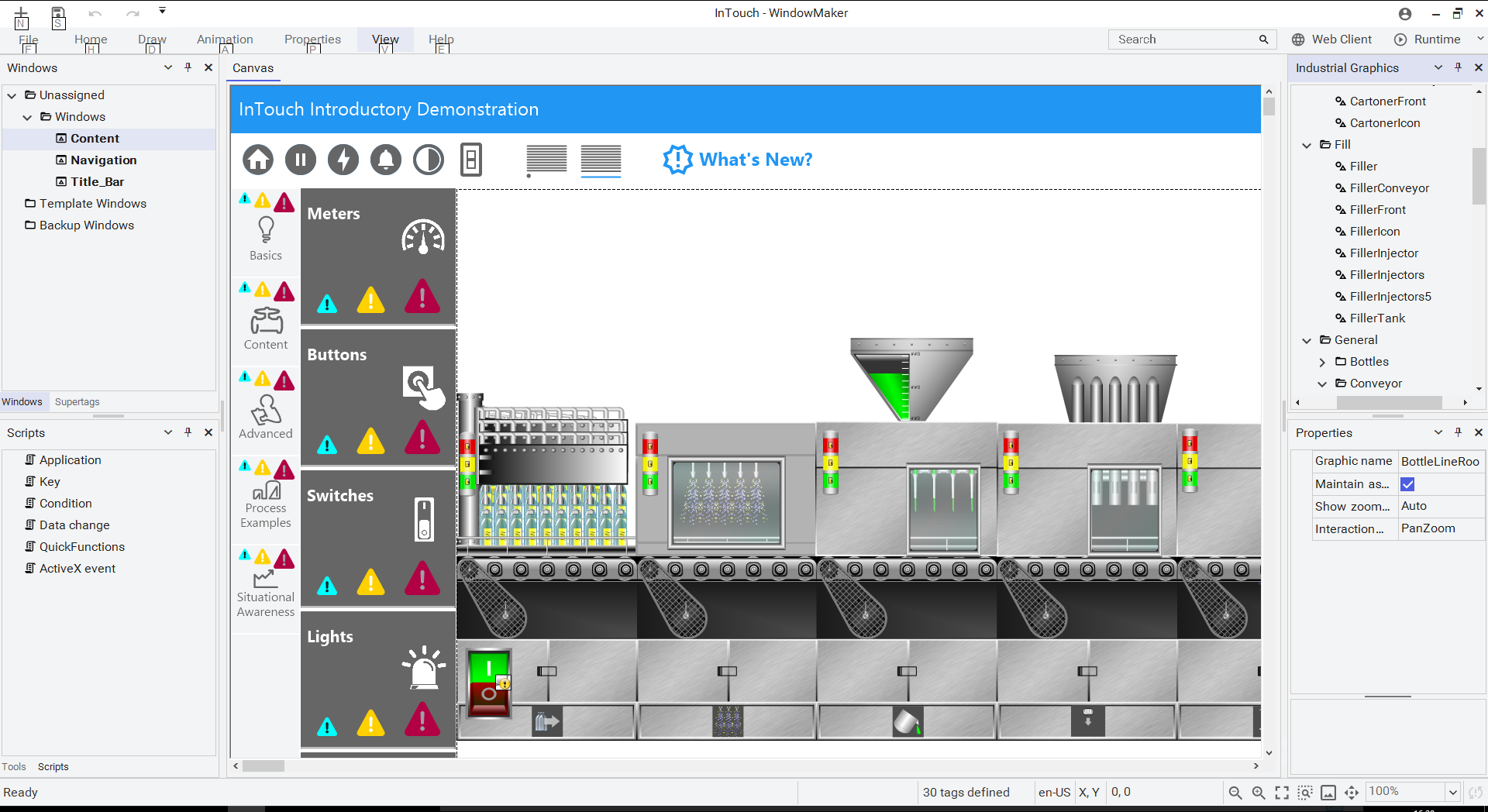
2. Przykładowy program w Codesys. Program ten jest „pusty”, jest w nim jedynie zdefiniowana komunikacja z robotem. Widok ogólny:
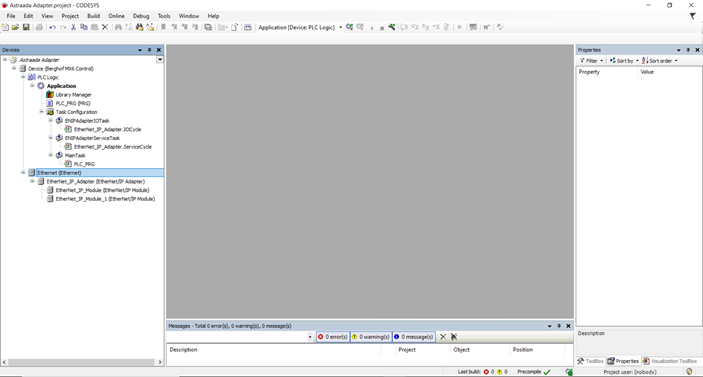
3. Ustawienia w programie dla sterownika PLC Astraada napisanym w środowisku programistycznym Codesys i ustawienie tam komunikacji jako scanner wraz z ramką 16×16 bajtów (czyli 128×128 bitów).
Zakładki tworzysz, naciskając prawym klawiszem myszy na element Ethernet, a następnie wybierając opcję: Add Device – Fieldbuses – EtherNet/IP Scanner

Okno device powinno zawierać:
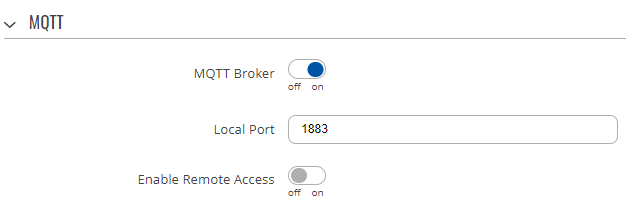
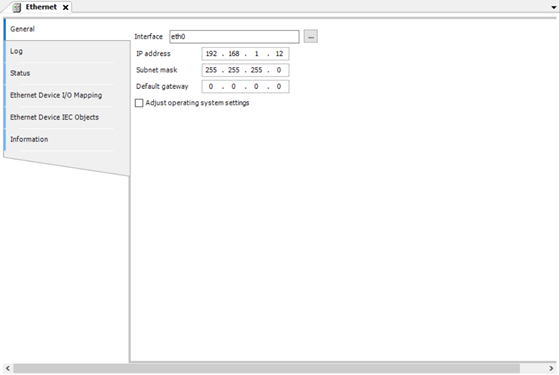
W zakładce Ethernet ustaw adres IP sterownika PLC oraz maskę podsieci.
W zakładkach Ethernet_IP_Scanner oraz Ethernet_IP_Adapter możesz mapować wysyłane i odbierane bity oraz przypisywać im zmienne w programie sterownika, a sygnały dedykowane – w robocie. W ten sposób komunikacja przekazuje informacje pomiędzy urządzeniami. Adres IP robota Kawasaki musisz wpisać ręcznie.
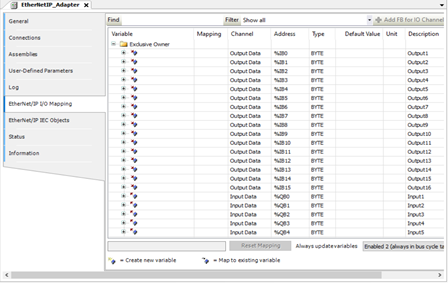
W zakładce Module I/O Mapping możesz przypisywać zmienne do bitów, które są wymieniane.
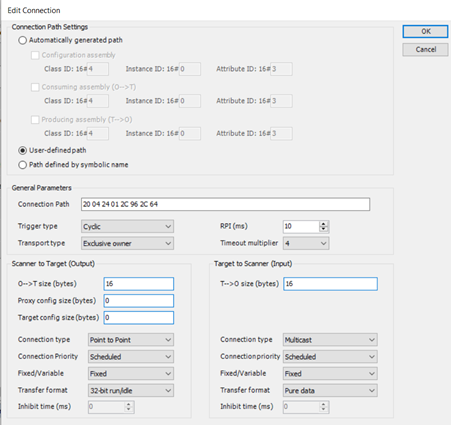
W zakładce Connections ustaw połączenie poprzez wpisanie odpowiednich wartości instancji robota Kawasaki. Definiujesz tam rodzaj połączenia oraz ilość wysyłanych i odbieranych danych.
Wybierz najpierw generate path automatically, gdzie dla instancji konfiguracyjnej wpisujesz wartość 1. Instancja odbieranych danych dla robotów Kawasaki to 150, natomiast poniżej podajesz tę wartość w zapisie HEX czyli 96.
Instancja wysyłanych danych dla robotów Kawasaki to 100, po przeliczeniu na HEX wpisujesz wartość 64. Następnie wybierasz opcję user-defined path. Poprawna konfiguracja powinna wyglądać tak:
4. Sprawdzenie poprawności działania połączenia.
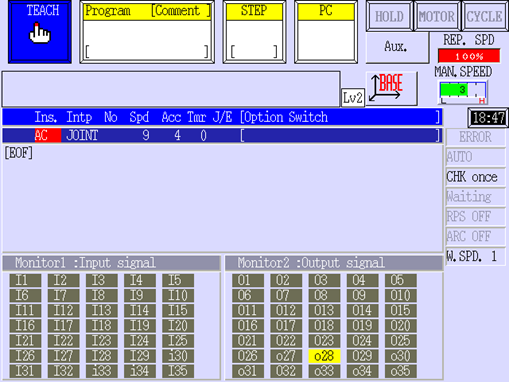
W celu uzyskania informacji o statusie połączenia, ustaw w widoku ogólnym teach pendant’a na jednym z „monitorów” opcję 29. Software EtherNet/IP Status. (MENU – Monitor1 – 29. Software EtherNet/IP Status).
Dla robota Kawasaki działającego jako adapter powinieneś mieć następujący odczyt:
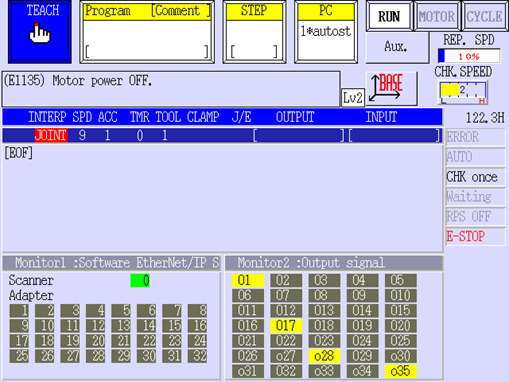
UWAGA: W przypadku, gdy okienko statusu jest czerwone, oznacza to, że komunikacja jest aktywna, ale nie jest poprawnie skonfigurowana. W przypadku szarego okienka (tak jak na naszym przykładzie dla Adaptera1,2,3) oznacza to, że komunikacji nie ma.
Najczęstsze przyczyny wywołania okienka w kolorze czerwonym, to:
– zła wielkość ramki, którą przesyła i odbiera robot (robot i sterownik muszą odbierać i wysyłać dokładnie tyle samo bitów, np. robot wysyła 8 odbiera 8, sterownik wysyła 8 odbiera 8),
– złe numery instancji,
– złe numery IP,
– inne błędy ustawień komunikacji.
W następnym odcinku dowiesz się, jak skonfigurować komunikację pomiędzy robotami Kawasaki w protokole komunikacyjnym Software Ethernet IP.