Czym jest oraz jakie możliwości daje tryb JOG
Kurs obsługi i konfiguracji serwonapędów Astraada SRV odc. 6
Kontakt w sprawie artykułu: Rafał Pilch - 2023-11-08

Z tego artykułu dowiesz się:
- czym jest tryb JOG,
- jakie daje możliwości,
- jak go skonfigurować.
Zapraszamy do kolejnego odcinka naszego kursu. Dziś przekonamy się, czym jest oraz na co pozwala tryb JOG, zwany również „biegiem próbnym”. Przedstawię Ci niezbędną wiedzę w postaci kombinacji ustawień, którą możesz wykorzystać w praktyce na własnym serwonapędzie Astraada.
Kurs obsługi i konfiguracji serwonapędów Astraada SRV
1. Z czego składa się zestaw serwonapędowy?2. Pierwsze podłączenie serwonapędu i przygotowanie do pracy.
3a. Sterowanie serwonapędem w EtherCAT – komunikacja i konfiguracja, część 1.
3b. Sterowanie serwonapędem w EtherCAT – komunikacja i konfiguracja, część 2.
4a. Sterowanie serwonapędem w Modbus RTU – komunikacja i konfiguracja, część 1
4b. Sterowanie serwonapędem w Modbus RTU – komunikacja i konfiguracja, część 2
5. Sterowanie Pulse Direction – jak sterować serwonapędem poprzez impulsy?
6. Czym jest oraz jakie możliwości daje tryb JOG?
7. Jak działa funkcja STO w serwonapędzie oraz jak podłączyć E-STOP?
Czym jest oraz jakie możliwości daje tryb JOG?
Po podłączeniu i zasileniu serwonapędu Astraada SRV zalecane jest wykonanie testowego ruchu przy wysprzęglonym serwosilniku. Tryb JOG pozwala na skontrolowanie poprawności wykonanych połączeń dla serwonapędu. Innymi słowy sprawdzamy, czy komunikacja między serwonapędem, serwomotorem i urządzeniami peryferyjnymi została prawidłowo przeprowadzona, w wyniku czego nasz sprzęt jest gotowy do zaprogramowania.
Mamy możliwość weryfikacji kierunku ruchu wału silnika oraz posiadamy kontrole nad ewentualnymi alarmami zgłaszanymi przez serwonapęd. Ruch zadajemy w sposób „ręczny”, odpowiednio nadpisując dane rejestry.
Przed przystąpieniem do testowego uruchomienia serwonapędu przy użyciu trybu JOG należy szczególnie upewnić się, że:
- Silnik nie jest uruchomiony. Operacje ruchu JOG są wyłączone dla pracującego silnika.
- Moment bezwładności obciążenia nie był większy niż piętnastokrotna wartości momentu bezwładności wirnika serwosilnika. W przeciwnym razie mogą wystąpić poważnie drgania mechaniczne.
- Zadano właściwe przyspieszenia dla rozpędzania i hamowania w parametrach P.054, P0.55 lub P0.56, P0.57 – zależnie od wybranego profilu ruchu. Zbyt wysokie przyspieszenia, czyli krótkie czasy na rozpędzanie i hamowanie, mogą spowodować uszkodzenia mechaniczne lub zgłoszenie błędu o przekroczeniu dopuszczalnej wartości uchybu pozycji.
Obsługa wyświetlacza
Przypomnijmy krótko, jakie funkcje posiadają przyciski pozwalające na przemieszczanie się w „menu”. Dowiesz się, jak wybrać tryb JOG i jak przypisać wartości do rejestrów.
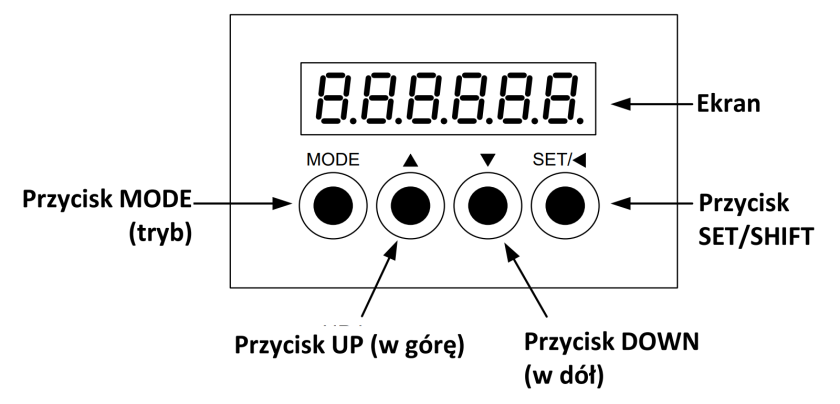
Funkcje przycisków
| Przycisk | Funkcja |
| MODE (tryb) | Służy do przełączania między różnymi trybami lub powrotu do poprzedniego menu. |
| UP (w górę) | Służy do wyboru parametru w górę lub zwiększenia wartości. W przypadku parametru wyświetlanego w wielu segmentach, można go użyć do przełączania pomiędzy segmentami najbardziej znaczącego bitu (MSB), środkowego i najmniej znaczącego bitu (LSB). |
| DOWN (w dół) | Służy do wyboru parametru w dół lub zmniejszania wartości. W przypadku parametru wyświetlanego w wielu segmentach, można go użyć do przełączania między segmentami MSB, środkowego bitu i LSB. |
| SET/SHIFT (dostosuj/ustaw) | Przytrzymać ten przycisk (około 0,6s) = SET Służy do wejścia do menu podrzędnego w trybie parametrów lub do ustawiania parametrów w trybie edycji. Nacisnąć ten przycisk = SHIFT Służy do zmiany kodu grupy w trybie parametrów lub do wprowadzenia pozycji, w której należy zmienić cyfrę w trybie edycji. |
Test ruchu JOG
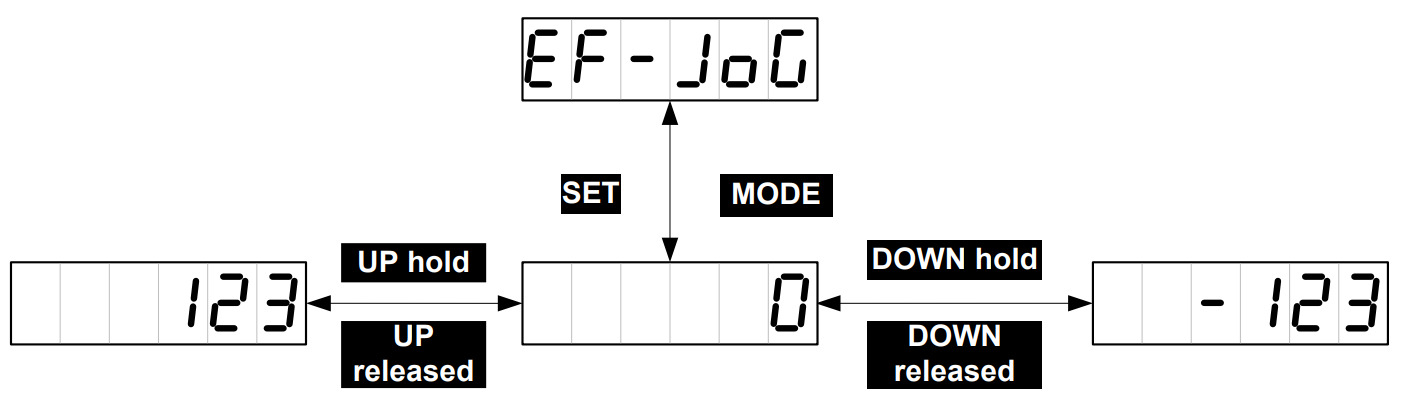
Naciskając MODE, przejdziemy do trybu funkcji pomocniczych. Dzięki przyciskom UP/DOWN, możemy wejść do menu programu JOG oznaczonego w poniższy sposób:
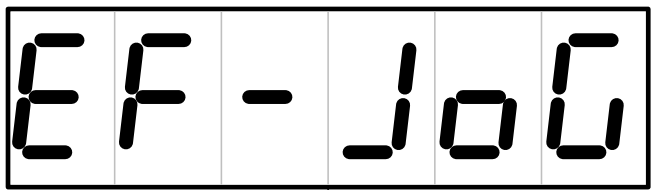
W celu wejścia do ekranu testowego JOG wciskamy SET. Pokazuje on aktualną prędkość obrotową silnika, dlatego możesz zaobserwować wartość „0.0” od razu po wejściu w ten tryb. Po naciśnięciu
i przytrzymaniu klawisza UP, silnik obraca się z określoną prędkością (domyślnie 200 obr/min)
w kierunku przeciwnym do ruchu wskazówek zegara. Zatrzymuje się po zwolnieniu przycisku. Jednak po wciśnięciu i podtrzymaniu przycisku DOWN, silnik obraca się z określoną prędkością zgodnie
z ruchem wskazówek zegara. Po zwolnieniu przycisku silnik zatrzymuje pracę.
Programowanie trybu JOG w serwonapędach Astraada SRV
1. W parametrze P0.05 ustawiamy prędkość JOG. Domyślnie ustawiona jest ona na wartość 200 obr/min.
2. Przyciskiem MODE przechodzimy do trybu EF-JOG i przyciskamy przycisk SET.
3. Aktywowany został tryb JOG.
4. Przyciskami w górę i w dół możemy wykonać ruch JOG serwosilnika.
Dodatkowo możemy również uruchomić tryb sekwencyjny JOG. Ten tryb działa niezależnie od trybu sterowania.
1. W parametrze P5.00 ustawiamy tryb pracy, przykładowo wartość 1 oznacza pracę w kierunku odwrotnym i wykonywaniem ruchów JOG przez zdefiniowaną ilość. Domyślnie: 0
2. P5.01 ustawienie ilości impulsów obrotu dla jednej sekwencji (10000 impulsów = 1 obrót). Domyślnie: 50000
3. P5.02 ustawienie prędkość JOG. Domyślnie: 500
4. P5.03 ustawienie przyspieszenia i hamowania. Domyślnie: 100
5. P5.04 ustawienie opóźnienia pomiędzy sekwencjami ruchu. Domyślnie: 100
6. P5.05 ustawienie liczby cyklów ruchu. Domyślnie: 1
7. Następnie po ustawieniu powyższych parametrów przechodzimy na wyświetlaczu serwowzmacniacza do trybu EF-Jog.
8. Strzałkami wybieramy tryb EF-PJo.
9. Przytrzymujemy przycisk SET na wyświetlaczu do momentu pojawienia się informacji „rEAdY”. Następnie klikamy SET i po komunikacie „on” urządzenie zacznie działać w trybie PJog.
Poczytaj więcej o serwonapędach Astraada.
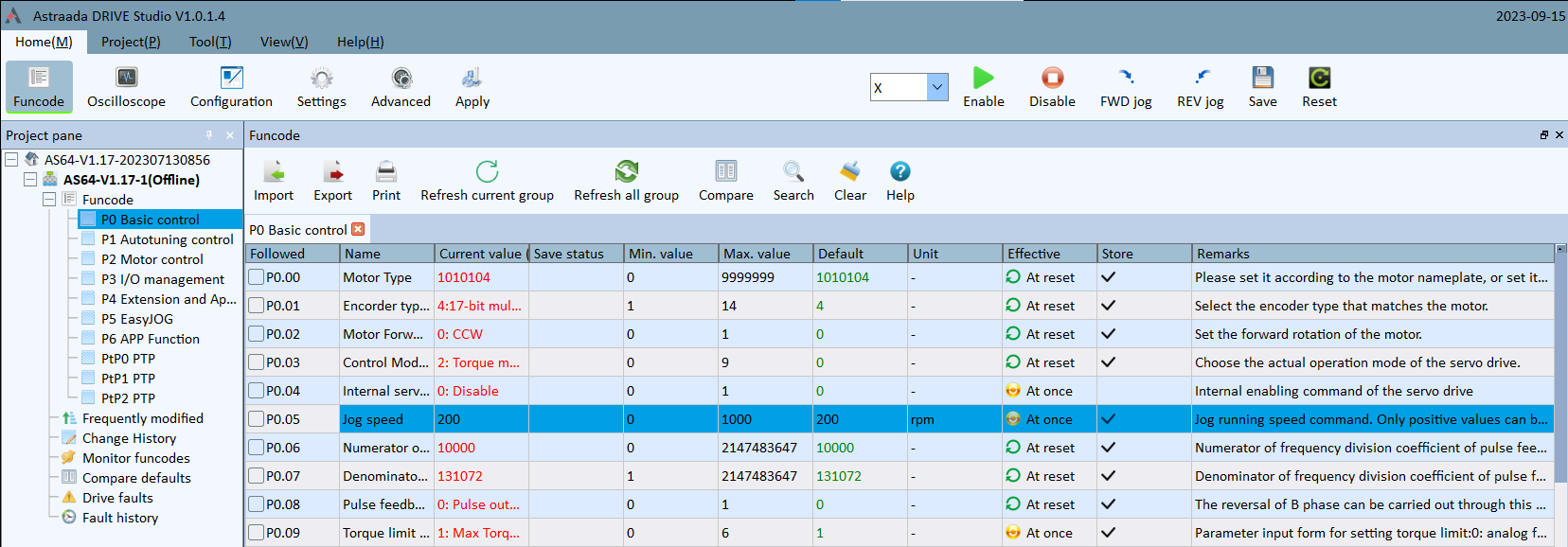
Programowanie trybu JOG przy pomocy aplikacji Astraada DRIVE Studio
Sterowanie trybem JOG jest możliwe z poziomu dedykowanej dla serwonapędów SRV aplikacji Astraada DRIVE Studio. Programowanie tego trybu odbywa się dokładnie w tych samych krokach, co sposób „ręczny” bezpośredni z wyświetlacza serwowzmacniacza.
- W parametrze P0.05 wybieramy prędkość JOG. Domyślnie ustawiona jest ona na wartość 200 obr/min.
- Dzięki „FWD jog” i „REV jog” możemy wykonać ruch JOG serwosilnika.
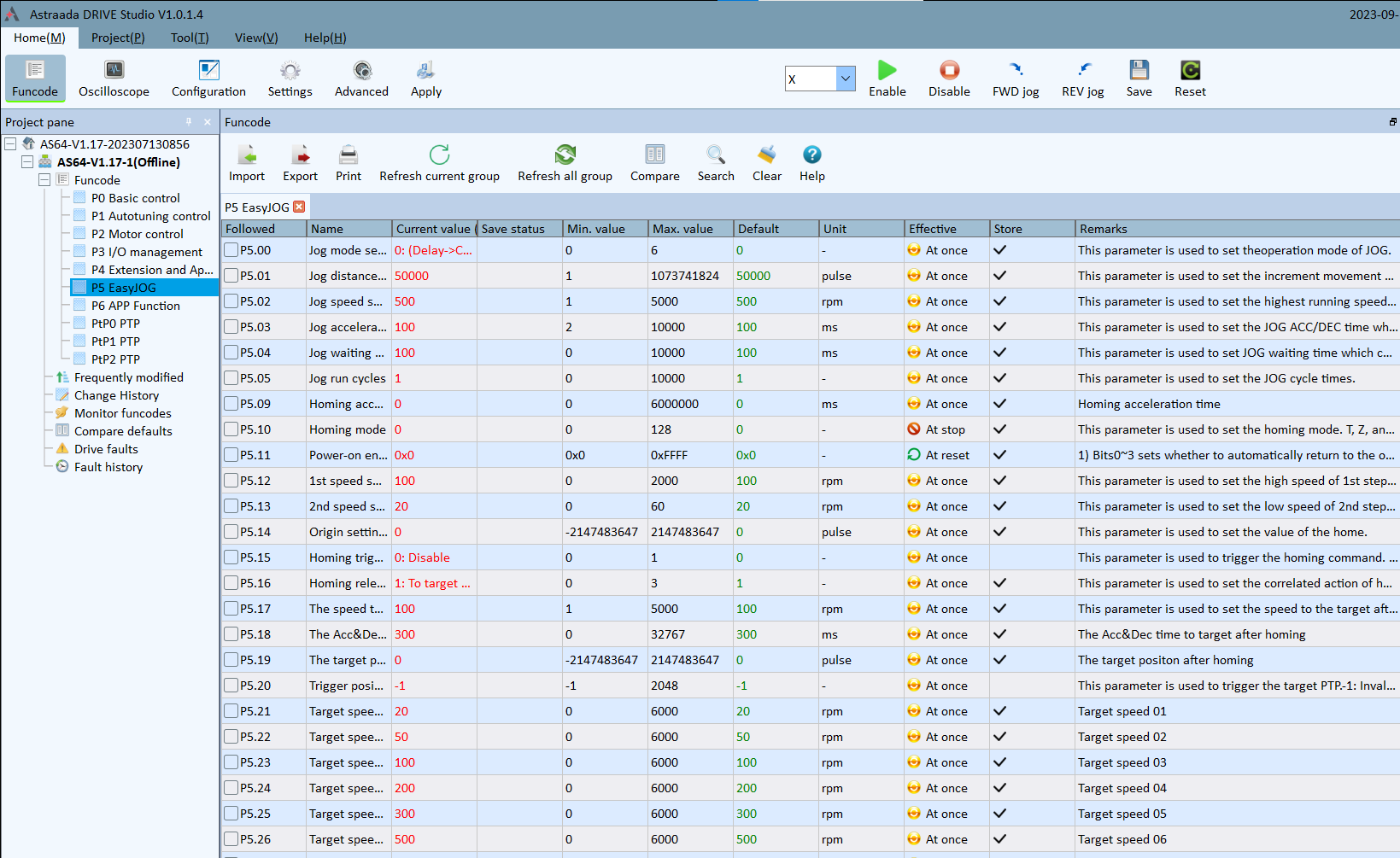
W celu uruchomienia trybu sekwencyjnego JOG, wystarczy wejść w zakładkę Funcode à P5 Easy JOG, gdzie znajdziemy pełną rozpiskę parametrów dedykowanych dla JOG’a.
Podsumowanie
Zastosowanie trybu JOG pozwala na weryfikację poprawności wykonywanych połączeń dla serwonapędu, weryfikację kierunku ruchu wału serwosilnika, jak również kontrolę ewentualnych alarmów zgłaszanych przez serwonapęd.
Funkcja jest często wykorzystywana, gdy użytkownik potrzebuje przejechać swobodnie pewną odległość lub wykonać procedurę sprawdzenia ruchu przy użyciu protokołu komunikacyjnego Modbus. Tryb JOG nadaje się idealnie do takich zastosowań.
Warto jednak pamiętać, aby wykorzystywać tą możliwość przed wgraniem właściwej aplikacji sterującej. Podczas testów w trybie JOG nie należy zakładać obciążenia.
Sprawdź ofertę serwonapędów w sklepie internetowym firmy ASTOR.

Autor kursu:
Marcin Ryznar
Student Akademii Górniczo-Hutniczej w Krakowie, na kierunku Automatyka i Robotyka