Cubic-S – jak działa i do czego służy opcjonalny moduł bezpieczeństwa w robotach Kawasaki Robotics?
Kontakt w sprawie artykułu: Klaudia Rzeszowska - 2021-12-30

Z tego artykułu dowiesz się:
- co to jest Cubic-S dla robotów Kawasaki Robotics,
- dlaczego i w jakim celu się go stosuje
- jakie funkcje bezpieczeństwa można wybrać podczas stosowania Cubic-S.
Moduł Cubic-S w robotach Kawasaki Robotics jest odpowiedzialny za zapewnienie bezpieczeństwa poprzez monitorowanie ruchów robota i zatrzymanie go w przypadku niedozwolonego ruchu. Cubic-S charakteryzuje się łatwą i szybką konfiguracją funkcji bezpieczeństwa.

Pamiętaj, że Cubic-S:
- w zależności od konfiguracji może działać w trybie manualnym i automatycznym,
- jest modułem nadrzędnym,
- sprawdzi się w prawie wszystkich aplikacjach, w których:
- robot współpracuje z człowiekiem,
- obszar roboczy robota jest ograniczony oraz występują wąskie obszary pracy,
- są używane niebezpieczne narzędzia, takie jak wiązka lasera.
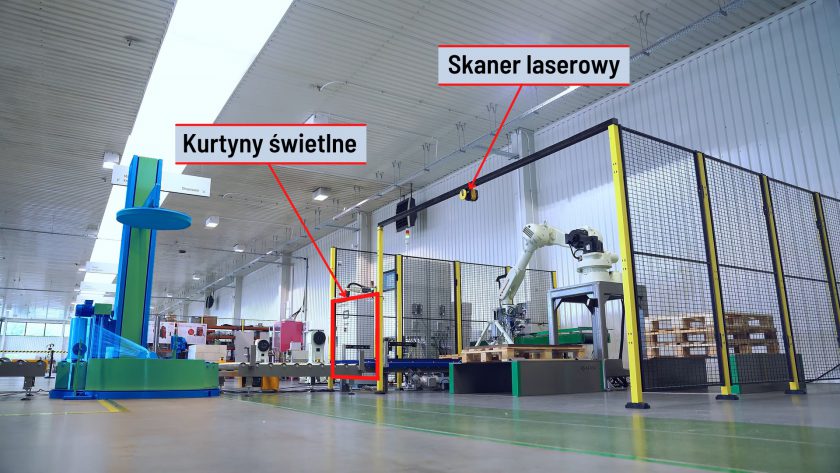
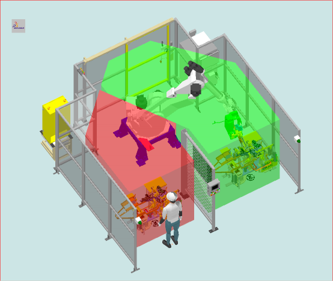
Na zdjęciu widać przykład zrobotyzowanego stanowiska Kawasaki Robotics z zastosowaniem modułu Cubic-S. Na obrazku zaznaczony został skaner laserowy i kurtyna świetlna. Laser umożliwia monitorowanie wjazdu robota MiR po odbiór palety ze stacji. Laser ten jest w stanie rozróżnić, że ktoś wchodzi w obszar pracy. W przypadku wjazdu robota MIR, stanowisko może normalnie pracować, natomiast gdy w strefę tę wejdzie człowiek, cały cykl pracy zostaje od razu zatrzymany. Nie potrzeba stosować krat ani wygrodzeń, aby zadziałał moduł Cubic-S. Kurtyny świetlne zlokalizowane są z lewej strony stanowiska – w miejscu, gdzie znajduje się przenośnik rolkowy. Kurtyna ta wychwytuje i zatrzymuje cały proces, gdy w obszar ten wchodzi człowiek.
Dodatkowo, na filmiku poniżej możesz zobaczyć zastosowanie Cubic-S:
Dobór opcji Cubic-S do robotów Kawasaki Robotics pozwala na bezpieczniejszą pracę z urządzeniami. Należy pamiętać o tym, że opcja ta jest nadrzędna nad wszystkimi innymi modułami. Co z tego wynika? W sytuacji, gdy strefę niebezpieczną wejdzie człowiek, moduł Cubic-S zdąży zareagować szybciej niż operator na danym stanowisku, wciskając przycisk awaryjnego zatrzymania. Z tego powodu tak dużą wartość dodaną ma dobór tej opcji już na etapie wyboru robota.
W module bezpieczeństwa Cubic-S jest do wyboru 8 funkcji bezpieczeństwa. Funkcje mogą być aktywowane lub wyłączane w zależności od wejść i wyjść bezpieczeństwa (jest ich 12; osiem jest konfigurowalnych, natomiast cztery mają przypisaną na stałe funkcjonalność), a także niezależnie od nich.
8 funkcji bezpieczeństwa Cubic-S dla robotów Kawasaki Robotics:
1. Cubic-S: funkcja monitorowania przestrzeni ruchu robota.
Funkcja monitorowania obszaru ruchu robota pozwala na określenie przestrzeni, w której praca robota jest dozwolona bądź nie. Brane są pod uwagę punkty i linie elementów ramienia, jak również elementy związane z narzędziem.
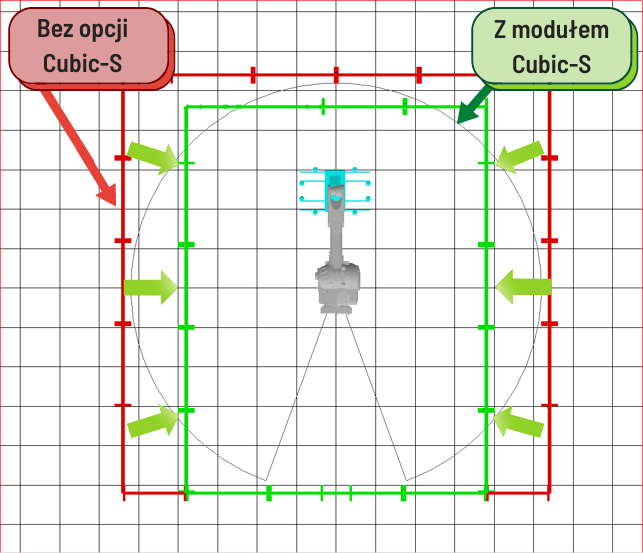
Na jednym obrazku zostały przedstawione dwie opcje. Pierwsza po prawej stronie z zastosowaniem modułu Cubic-S, z zaznaczonym na zielono obszarem i dodatkowo narysowanymi strzałkami oraz na czerwono, po lewej stronie: bez zamontowania Cubic-S. Jak można łatwo zauważyć, gdy stosujesz opcję Cubic-S, możesz znacznie zmniejszyć obszar pracy robota, dzięki czemu łatwiej jest go zaimplementować na hali i do współpracy z innymi maszynami.
2. Cubic-S: funkcja monitorowania złączy
Ta funkcja pozwala na określenie limitów dla poszczególnych złączy robota. Po przekroczeniu wartości dopuszczalnej, czyli w momencie, gdy osiągnie limit złączy, robot Kawasaki Robotics zostaje zatrzymany awaryjnie i nie ma potrzeby stosowania dodatkowego wyłącznika krańcowego strefy. Istnieje możliwość ograniczenia ruchu każdej osi z osobna.
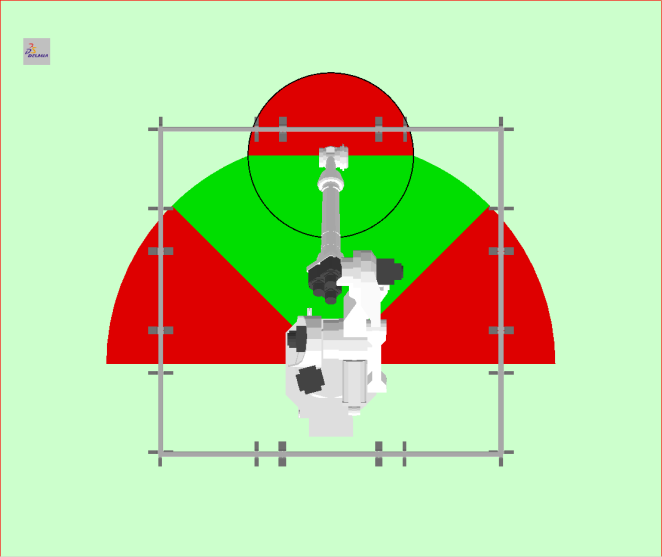
Na obrazku została zaprezentowana 1. i 6. oś w robocie Kawasaki. Obszar obrotu pierwszej osi, zaznaczony większym półkolem, jest ograniczony i robot może pracować tylko w zielonym kącie. Obszar obrotu szóstej osi, zaznaczony małym kółkiem pokazuje, że robot może pracować w maksymalnym kącie 180 stopni. Dzięki tej funkcji możesz więc ograniczać kąt obrotu pojedynczych osi. Każdą oś można osobno skonfigurować dzięki Cubic-S, zamiast używać mechanicznych stoperów.
3. Cubic-S: funkcja monitorowania prędkości
Dzięki tej opcji możesz sprawdzać prędkość robota względem punktu TCP (ang. Tool Center Point – punkt środka narzędzia). W razie wystąpienia nagłej zmiany prędkości, moduł Cubic-S awaryjnie zatrzyma robota Kawasaki Robotics.
Na ilustracji pokazana jest mata bezpieczeństwa (zamarkowany pomarańczowy prostokąt) – znajduje się na niej włączanie funkcji kontroli prędkości.
4. Cubic-S: funkcja monitorowania zatrzymania
Funkcjonalność ta pozwala kontrolować, czy robot Kawasaki Robotics, bądź jego dodatkowa oś nie porusza się. W przypadku jakiegokolwiek ruchu, zostaje natychmiast odcięte zasilanie napędów robota i zaciśnięcie hamulców.

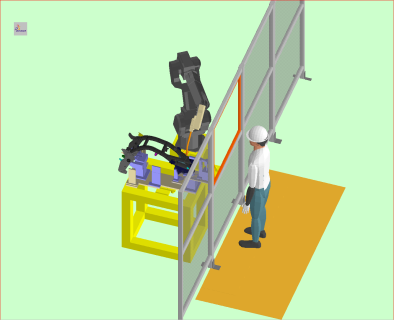
Dobrym przykładem jest symulacja stanowiska, przedstawiona na rysunku. W momencie wymiany detalu, gdy operator wkracza w obszar pracy robota, czyli przecina kurtynę świetlną, moduł Cubic-S nadzoruje, czy robot zaczyna wykonywać ruch – i jeśli tak robi – zatrzymuje robota.
5. Cubic-S: funkcja monitorowania orientacji narzędzia
Dzięki zastosowaniu tej opcji istnieje możliwość sprawdzenia orientacji narzędzia. Dobrym przykładem jest zamontowane narzędzie do cięcia wodą lub spawania laserem, wszędzie tam gdzie operacja wymaga wiązki danego medium.
W przypadku przekroczenia dozwolonego kąta wychylenia narzędzia robot zostaje zatrzymany awaryjnie. Istnieje możliwość zdefiniowania pięciu zakresów orientacji narzędzia. Dzięki temu niemożliwe jest skierowanie narzędzia w stronę operatora lub poza obszar pracy.
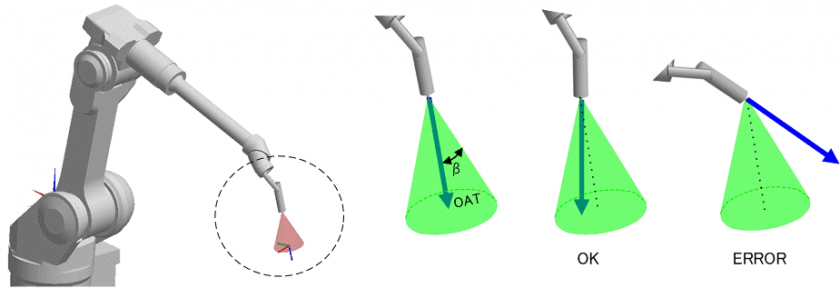
Na obrazku przedstawiony jest robot z zamontowanym na końcu ramienia narzędziem, które wykorzystuje strumień/wiązkę padania, a wychylając się za bardzo może spowodować zagrożenie. Dlatego trzeba ograniczyć kąt, aby narzędzie nie wychyliło się poza obszar pola zdefiniowanego względem układu narzędziowego.
Na obrazkach widać kształt definiowanego obszaru oraz monitorowanie przez Cubic- S (zielony stożek), strumienia/wiązki (niebieska strzałka). Gdy strumień jest wewnątrz stożka, tak jak na tych dwóch pierwszych ilustracjach – sytuacja jest akceptowalna, natomiast gdy wyjdzie poza tę bryłę, to powstaje błąd, tak jak na zaprezentowanym ostatnim rysunku. Gdy wiązka zostanie wychylona poza obszar Cubic-S, dochodzi do natychmiastowego zatrzymania pracy robota Kawasaki Robotics.
6. Cubic-S: funkcja ochronnego zatrzymania
Cubic-S może być połączony z zewnętrznymi urządzeniami zabezpieczającymi np. kurtyny, lasery. Pozwala to na zatrzymanie robota Kawasaki Robotics na 3 różne sposoby.
Ochronne zatrzymanie może działać niezależnie w trybie ręcznym i automatycznym. Dopuszcza się zatrzymanie w kategorii „2”, które oznacza, że w momencie zadziałania tego ochronnego zatrzymania robot wyhamuje i przejdzie w stan monitorowania zatrzymania.
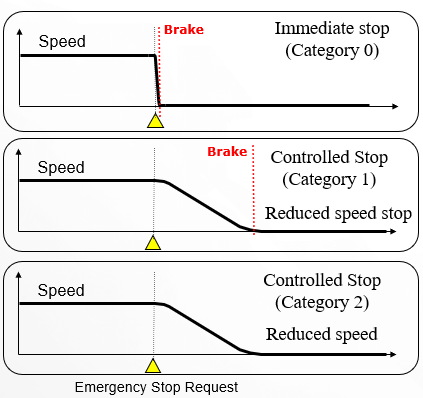
Na obrazku zaprezentowano trzy sposoby zatrzymania pracy robota:
„0” – odłączane jest zasilanie silników i zaciskane są hamulce.
„1” – kontrolowane zatrzymanie, a w następnym kroku wyłączenie silników i zaciśnięcie hamulców.
„2” – kontrolowane zatrzymanie, następnie robot jest utrzymywany w trybie monitorowania stanu STOP bez zaciskania hamulców. Pozwala to na wznowienie procesu
7. Cubic-S: funkcja awaryjnego zatrzymania
Funkcja ta jest kompatybilna z obwodem zatrzymania awaryjnego. Zatrzymuje ona robota natychmiast po otrzymaniu sygnału wejściowego. Do takiego zaprzestania pracy robota może dojść na dwa sposoby. Gdy zależy Ci na ponownym rozpoczęciu pracy robota, nie wystarczy wyłączyć sygnału awaryjnego zatrzymania, musisz dodatkowo zresetować błąd.
„0” – Odłączane jest zasilanie silników i zaciskane są hamulce.
„1” – kontrolowane zatrzymanie, a w następnym kroku wyłączenie silników i zaciśnięcie hamulców.
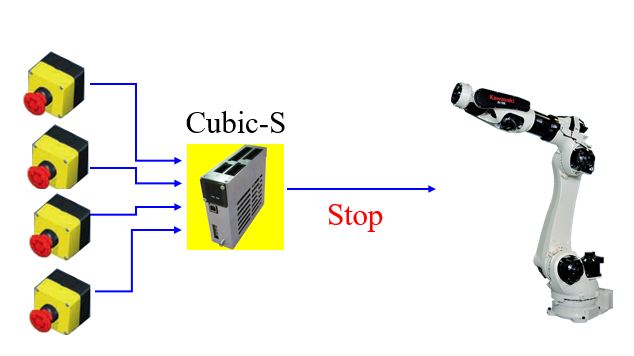
Na obrazku został przedstawiony przycisk awaryjnego zatrzymania. Po jego wciśnięciu praca robota Kawasaki Robotics zostaje zatrzymana w trybie natychmiastowym.
8. Cubic-S: funkcja wystawienia stanu bezpieczeństwa
Istnieje możliwość wystawienia wyjść bezpieczeństwa w zależności od statusu opisanych wyżej 1-7 funkcji Cubic-S i wejść bezpieczeństwa. Funkcja wyjścia bezpieczeństwa może sterować urządzeniami zewnętrznymi np. ryglem, może wysyłać sygnały do sterownika Safety PLC.
Zarządzanie strefami Cubic-S może warunkowo włączyć lub wyłączyć strefę, w której robot może się poruszać bądź nie. Na rysunku widać, że operator przeciął kurtynę pierwszego stanowiska, czyli strefę zabronioną dla robota. W momencie, gdyby robot próbował wykonać tam ruch, to w tej strefy Cubic-S go zatrzyma.
Warto pamiętać, ze robot nie zmieni trajektorii ruchu – jeżeli jakaś strefa na jego drodze została oznaczona jako zabroniona, robot zostanie zatrzymany.
Podsumowanie
W module Cubic-S jest do wyboru 8 funkcji bezpieczeństwa. Funkcje mogą być aktywowane lub wyłączane w zależności od wejść i wyjść bezpieczeństwa. Dobór właściwych opcji Cubic-S do robotów Kawasaki Robotics pozwala na bezpieczniejszą pracę z tymi urządzeniami. Należy pamiętać o tym, że opcja ta jest nadrzędnym modułem nad wszystkimi innymi.
Dowiedz się, jak zamontować moduł bezpieczeństwa Cubic-S dla robotów Kawasaki Robotics:
W kolejnym artykule poszerzysz swoją wiedzę z zakresu stopnia ochrony IP54 dla kontrolerów do robotów Kawasaki Robotics.