
Strona główna ASTOR
Wszystkie wpisy
556 postów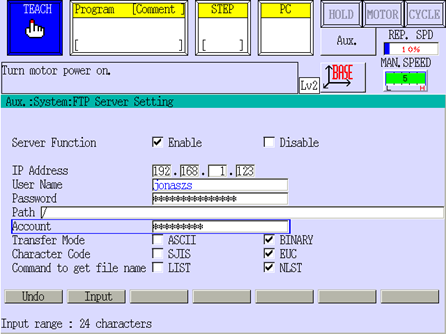
Bez kategorii
Konfiguracja komunikacji pomiędzy robotem przemysłowym a serwerem FTP. | Kurs opcji komunikacyjnych i systemowych w robotach Kawasaki Robotics odc. 1
W tym odcinku pokażemy Ci, jak skonfigurować robota Kawasaki Robotics z kontrolerem… 2022-03-10 Jonasz Sobaniec
Konfiguracja komunikacji pomiędzy robotem przemysłowym a serwerem FTP. | Kurs opcji komunikacyjnych i systemowych w robotach Kawasaki Robotics odc. 1
W tym odcinku pokażemy Ci, jak skonfigurować robota Kawasaki Robotics…
Bez kategorii
Jak zapewnić bezawaryjne działanie kontrolerów do robotów w różnych warunkach przemysłowych na przykładzie F60 od Kawasaki Robotics.
Kontroler jest jednostką sterującą do robotów przemysłowych. Kontroler pełni funkcję mózgu całej… 2022-03-04 Klaudia Rzeszowska
Jak zapewnić bezawaryjne działanie kontrolerów do robotów w różnych warunkach przemysłowych na przykładzie F60 od Kawasaki Robotics.
Kontroler jest jednostką sterującą do robotów przemysłowych. Kontroler pełni funkcję…
Bez kategorii
Wkładki SFP – czym są , jakie mają funkcje i jak je podłączyć? Wszystko, co musisz wiedzieć o modułach światłowodowych.
Wkładki SFP są to wymienne moduły, będące konwerterami sygnałów świetlnych na cyfrowe.… 2022-02-25 Mateusz Fas
Wkładki SFP – czym są , jakie mają funkcje i jak je podłączyć? Wszystko, co musisz wiedzieć o modułach światłowodowych.
Wkładki SFP są to wymienne moduły, będące konwerterami sygnałów świetlnych…
Automatyka w praktyce
Diagnostyka w Codesys – jak sprawdzać działanie oprogramowania i sterownika? | Kurs programowania w Codesys odc. 8
Zapraszamy na kolejny odcinek naszego kursu. Tym razem skupimy się na diagnostyce… 2022-02-08 Mateusz Pytel
Diagnostyka w Codesys – jak sprawdzać działanie oprogramowania i sterownika? | Kurs programowania w Codesys odc. 8
Zapraszamy na kolejny odcinek naszego kursu. Tym razem skupimy się…
Bez kategorii
Oprogramowanie przemysłowe AVEVA Edge wspiera wydajną obsługę maszyn etykietujących
Firma Nita, producent maszyn etykietujących, wdrożyła rozwiązanie AVEVA Edge, które daje możliwość… 2022-02-03 Mateusz Fas
Oprogramowanie przemysłowe AVEVA Edge wspiera wydajną obsługę maszyn etykietujących
Firma Nita, producent maszyn etykietujących, wdrożyła rozwiązanie AVEVA Edge, które…
Bez kategorii
Jak zabezpieczyć projekt w sterowniku PLC przed jego utratą? Jak działają funkcje Backup, Restore, Cloning, AutoLoad oraz AutoRun?
Problem pojawia się, kiedy bateria się rozładuje lub ulegnie uszkodzeniu. W takim… 2022-01-27 Mateusz Fas
Jak zabezpieczyć projekt w sterowniku PLC przed jego utratą? Jak działają funkcje Backup, Restore, Cloning, AutoLoad oraz AutoRun?
Problem pojawia się, kiedy bateria się rozładuje lub ulegnie uszkodzeniu.…
Bez kategorii
Jak zmodernizowano przemysłowe piece do wypieku pizzy, dzięki wykorzystaniu sterowników PLC+HMI ze zdalnym dostępem?
Głównym zastosowaniem przemysłowych pieców jest wypiekanie dużej liczby pizz jednego rodzaju podczas… 2022-01-24 Kamil Zajdel
Jak zmodernizowano przemysłowe piece do wypieku pizzy, dzięki wykorzystaniu sterowników PLC+HMI ze zdalnym dostępem?
Głównym zastosowaniem przemysłowych pieców jest wypiekanie dużej liczby pizz jednego…
Bez kategorii
Serwonapędy Astraada SRV-64 – szybsze od serii Astraada SRV-63, mniejsze o 45%, z funkcją STO.
Dostępna do tej pory seria serwonapędów Astraada SRV-63 niedawno doczekała się nowszej… 2022-01-21 Rafał Pilch
Serwonapędy Astraada SRV-64 – szybsze od serii Astraada SRV-63, mniejsze o 45%, z funkcją STO.
Dostępna do tej pory seria serwonapędów Astraada SRV-63 niedawno doczekała…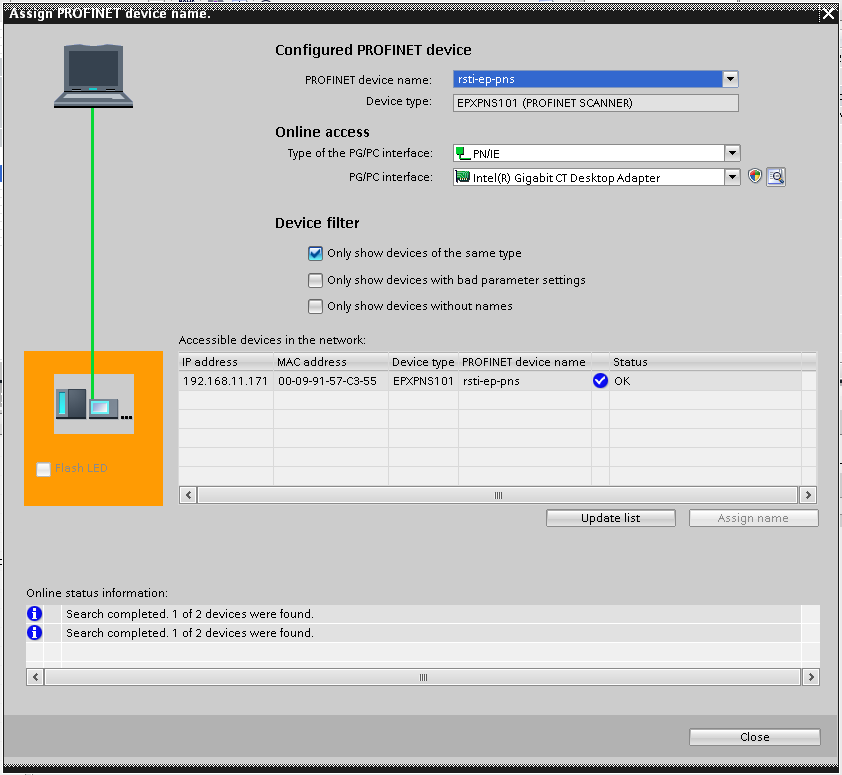
Bez kategorii
Jak skomunikować sterownik S7-1200 z wyspą IO RSTi-EP po Profinet
W poniższym przykładzie wykorzystano sterownik S7-1200 1212C, wyspę Profinet RSTi-EP od Emerson… 2022-01-04 Wojciech Talik
Jak skomunikować sterownik S7-1200 z wyspą IO RSTi-EP po Profinet
W poniższym przykładzie wykorzystano sterownik S7-1200 1212C, wyspę Profinet RSTi-EP…
Bez kategorii
Cubic-S – jak działa i do czego służy opcjonalny moduł bezpieczeństwa w robotach Kawasaki Robotics?
Moduł Cubic-S w robotach Kawasaki Robotics jest odpowiedzialny za zapewnienie bezpieczeństwa poprzez… 2021-12-30 Klaudia Rzeszowska
Cubic-S – jak działa i do czego służy opcjonalny moduł bezpieczeństwa w robotach Kawasaki Robotics?
Moduł Cubic-S w robotach Kawasaki Robotics jest odpowiedzialny za zapewnienie…
Bez kategorii
Modernizacja systemów sterowania maszyn w branży tekstylnej w oparciu o sterowniki PLC+HMI Horner APG
Jeden z włoskich producentów wełny i tekstyliów postanowił zmodernizować system sterowania maszyn… 2021-11-17 Kamil Zajdel
Modernizacja systemów sterowania maszyn w branży tekstylnej w oparciu o sterowniki PLC+HMI Horner APG
Jeden z włoskich producentów wełny i tekstyliów postanowił zmodernizować system…
Bez kategorii
Komunikacja EtherCAT w przemiennikach Astraada DRV-28. Krok po kroku.
W filmie zobaczysz jak przygotować przemiennik częstotliwości do pracy w protokole EtherCat.… 2021-11-12 Rafał Pilch