
Strona główna ASTOR
Jonasz Sobaniec
5 postów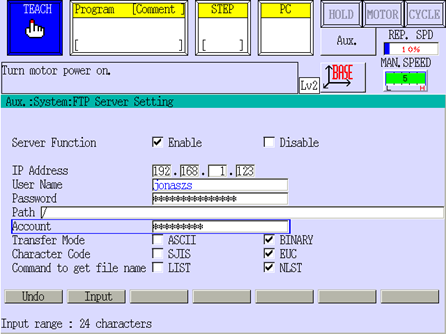
Bez kategorii
Konfiguracja komunikacji pomiędzy robotem przemysłowym a serwerem FTP. | Kurs opcji komunikacyjnych i systemowych w robotach Kawasaki Robotics odc. 1
W tym odcinku pokażemy Ci, jak skonfigurować robota Kawasaki Robotics z kontrolerem… 2022-03-10 Jonasz Sobaniec
Konfiguracja komunikacji pomiędzy robotem przemysłowym a serwerem FTP. | Kurs opcji komunikacyjnych i systemowych w robotach Kawasaki Robotics odc. 1
W tym odcinku pokażemy Ci, jak skonfigurować robota Kawasaki Robotics…
Bez kategorii
Konfiguracja komunikacji pomiędzy robotem Kawasaki z kontrolerem F – adapterem – a sterownikiem Astraada ONE – skanerem – w protokole komunikacyjnym Software Ethernet IP – odc.4
Witaj w kolejnym odcinku kursu Ethernet IP w robotach Kawasaki. Pokażemy Ci… 2021-05-04 Jonasz Sobaniec
Konfiguracja komunikacji pomiędzy robotem Kawasaki z kontrolerem F – adapterem – a sterownikiem Astraada ONE – skanerem – w protokole komunikacyjnym Software Ethernet IP – odc.4
Witaj w kolejnym odcinku kursu Ethernet IP w robotach Kawasaki.…
Bez kategorii
Konfiguracja komunikacji pomiędzy robotem Kawasaki z kontrolerem F – skanerem – a sterownikiem Astraada ONE – adapterem – w protokole komunikacyjnym Software Ethernet IP – odc.3
W tym odcinku dowiesz się jak skonfigurować komunikację pomiędzy robotem Kawasaki z… 2021-04-19 Jonasz Sobaniec
Konfiguracja komunikacji pomiędzy robotem Kawasaki z kontrolerem F – skanerem – a sterownikiem Astraada ONE – adapterem – w protokole komunikacyjnym Software Ethernet IP – odc.3
W tym odcinku dowiesz się jak skonfigurować komunikację pomiędzy robotem…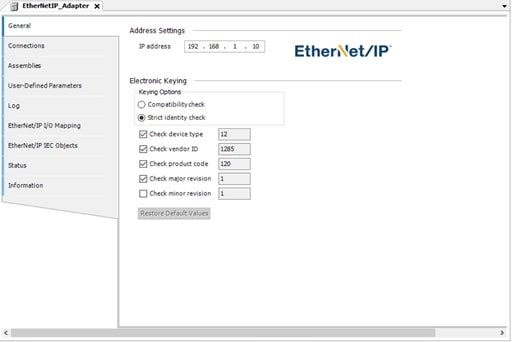
Bez kategorii
Konfiguracja komunikacji pomiędzy robotem Kawasaki z kontrolerem E – adapterem – a sterownikiem Astraada ONE – skanerem – w protokole komunikacyjnym Software Ethernet IP – odc.2
W tym odcinku dowiesz się jak skonfigurować komunikację pomiędzy robotem kawasaki z… 2021-04-15 Jonasz Sobaniec
Konfiguracja komunikacji pomiędzy robotem Kawasaki z kontrolerem E – adapterem – a sterownikiem Astraada ONE – skanerem – w protokole komunikacyjnym Software Ethernet IP – odc.2
W tym odcinku dowiesz się jak skonfigurować komunikację pomiędzy robotem…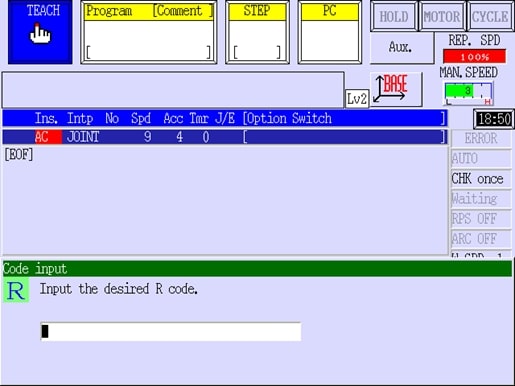
Bez kategorii
Konfiguracja komunikacji pomiędzy robotem Kawasaki z kontrolerem E – skanerem – a sterownikiem Astraada ONE – adapterem – w protokole komunikacyjnym Software Ethernet IP – odc.1
Witaj w pierwszym odcinku kursu EthernetIP w robotach Kawasaki. Dowiesz się w… 2021-04-08 Jonasz Sobaniec